ЛЧ – логическая часть (контролирует соблюдение условий синхронизации, и по определённому алгоритму выдаёт сигнал на включение выключателя).
БПС – блок подгонки скорости или устройство для подгонки частот (формирует импульсы заданной интенсивности, воздействующие на МУТ).
МУТ – механизм управления турбиной.
Схема внутренних соединений АСТ-4 полностью приведена в [Барзам, с. 241].
 ,
,
где К1, К2 – коэффициенты пропорциональности, t0 = TS – tОП.
Учитывая, что ![]() :
:  .
.
Заменив tg его аргументом, получим: 
Вывод: tОП пропорционально отношению двух коэффициентов и не зависит от ωS.
(С помощью этих коэффициентов (напряжения биения и его производной) определяется отрезок времени от момента подачи команды на включение и моментом совпадения векторов ЭДС. Этот отрезок времени равен времени включения выключателя и остаётся неизменным и не зависящим от частоты вращения.)
Схема БВО
Первичная обмотка дифференцирующего трансформатора ТР с магнитопроводом, имеющим воздушный зазор, включена на разность напряжений синхронизируемого генератора и сети. Предварительно эта разность напряжений фильтруется для получения огибающей биений и выпрямляется. К этому трансформатору подключается реле опережения KL. Первая обмотка – KL1 – этого реле пропорциональна Us, т.е. огибающей, а вторая – KL2 – пропорциональна её производной.
 В
качестве органа опережения используется поляризованное реле с двумя катушками.
В
качестве органа опережения используется поляризованное реле с двумя катушками.
![]() ;
; ![]()
В реле используются переключающиеся контакты:
Контакты этого реле переключаются в момент перехода суммарной намагничивающей силы через 0.
В АСТ-4 имеется орган опережения по углу с возможным регулированием уставки.
УКС выполнено с помощью двух органов:
- орган опережения по времени;
- орган опережения по углу.
Контроль напряжения осуществляется поляризованным реле КН, включенным на выпрямленное напряжение по следующей схеме:
Его задача – контролировать совпадение значений (амплитуд) синхронизируемых напряжений. Контроль равенства напряжений осуществляется при угле δ=1800. При расхождении векторов синхронизируемых напряжений при условии равенства их значений напряжение, приложенное к реле КН, равно нулю. Это реле отпускает якорь каждый период биений в зоне углов, близких к 180°. Повторное притяжение якоря происходит при увеличении ΔU, т.е. когда угол δ начинает приближаться к 360°.

РО – орган опережения по времени.
Работа реле происходит следующим образом. Если разность между амплитудами синхронизируемых напряжений не превышает заданное значение, то при расхождении векторов напряжения на угол, близкий к 180°, замыкаются контакты реле контроля разности напряжений КН (замыкается контакт КН1). В течение первой половины биений также срабатывает орган опережения по времени (РО) и реле контроля частоты КЧ.
Контактами РО2 и КЧ2 включается обмотка реле KL1. Реле KL1 срабатывает и самоудерживается через контакты KL1.1 и KL1.2. Одновременно реле KL1 подготавливает контактом KL1.3 цепь для срабатывания выходного реле KL2. Реле KL2 срабатывает после того, как реле КН подтянет якорь и замкнёт контакты КН2, а контакты РО1 и КЧ1 в это время будут замкнуты.
Командное реле KL2 должно работать только в случаях, когда реле контроля частоты КЧ отпускает свой контакт раньше, чем это сделает орган опережения РО.
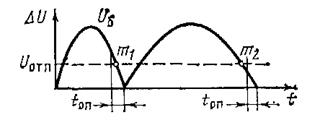
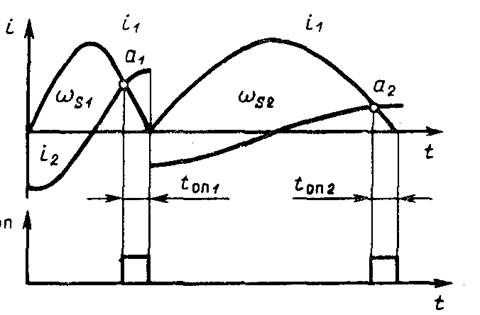
tОП – время опережения оптимума, m – момент срабатывания реле контроля частоты. Если частота скольжения больше заданной частоты, то, как видно их рисунка, первым срабатывает на отпускание орган опережения с временем опережения оптимума; реле контроля частоты с уставкой отпускания срабатывает па отпускание вторым (в точке m1). Схема включения реле опережения РО и контроля частоты КЧ выполнена таким образом, что в этом случае включения выключателя не произойдет. Если частота скольжения меньше заданной величины первым (в точке m2) срабатывает па отпускание реле контроля частоты, вторым – орган опережения. В этом случае выключатель включается.
Такое действие в схеме достигается тем, что реле KL1 удерживается во включенном положении только лишь в случае, если контакт КЧ1 реле контроля частоты по времени замкнется раньше, чем разомкнется контакт реле опережения РО2. Обесточение реле KL1 приводит к разрыву цепи обмотки KL2 и, следовательно, исключает возможность включения выключателя.
В схеме предусмотрено шунтирование контакта KL1.3 контактом KL2.2. Это сделано для обеспечения самоудерживания реле KL2 через контакт КЧ1 после срабатывания реле KL2. Конденсатор 18 и резистор 34 в цепи обмотки реле KL2 предусмотрены для облегчения работы контактов. Цепь реле KL2 контролируется вспомогательным контактом ВК1 выключателя, замкнутым, когда выключатель разомкнут.
(Из лекций ТИП) Случай, когда ωS<ωSMAXДОП
При δ=1800 контакты РО2 замкнуты и КЧ2 замкнуты, РО1 и КЧ1 – разомкнуты, и если ΔU<UУСТ. (КН), то КН1 – замкнут, КН2 – разомкнут. При угле 1800 сработает КL1.
В случае, когда ωS>ωSMAXДОП включение выключателя не произойдёт.
Принцип действия уравнителя частот:
Его задача: определить знак скольжения и выработать импульсы, обеспечивающие пропорциональность регулирования частоты.
Для определения знака скольжения используется второе напряжение биения USAC, сдвинутое относительно исходного USAА на угол 600.
Устройство для подгонки частот состоит из двух реле скольжения и одного реле времени КТ.
Принцип действия устройства заключается в следующем. Одно реле скольжения KLП через выпрямитель и регулируемое сопротивление резистора включено па напряжение UАГ – UСс (UАГ – напряжение фазы А со стороны генератора; UСс – напряжение фазы С со стороны системы). Второе реле скольжения KLУ через выпрямитель и регулируемое сопротивление резистора включено на напряжение UСГ – UСс.
Напряжение к обмоткам реле КLП и KLУ подводится от измерительных трансформаторов напряжения сети и генератора. Вторичные цепи фаз В измерительных трансформаторов соединены между собой.
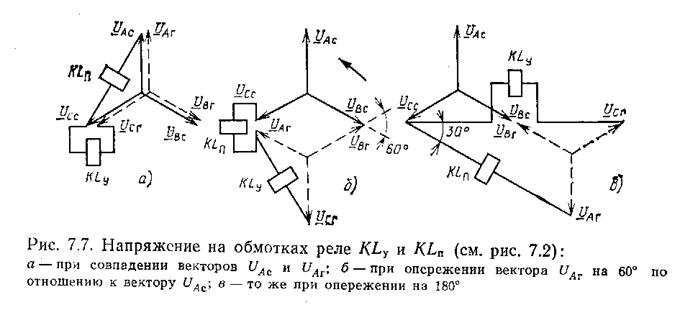
Оба реле имеют одинаковое напряжение срабатывания с низким коэффициентом возврата. Положительное значение угла δ принято для случая, когда частота вращения синхронизируемого генератора больше частоты системы. Если частота вращения синхронизируемого генератора меньше частоты вращения генераторов энергетической системы, за время каждого периода биений первым срабатывает реле КLП, В этом случае контактом КLП1 размыкается цепь реле КLУ, а контактом КLП4 по цепи КLП4 – КLУ4 подаётся командный импульс Прибавить. (при анализе рисунка не путать угол δ по оси абсцисс со временем: на рис. 7.7а напряжение на КLП больше чем на КLУ)
Если частота вращения синхронизируемого генератора больше частоты вращения генераторов энергетической системы, за время каждого периода биений первым срабатывает КLУ, размыкая контакт КLУ1 и замыкая контакт КLУ3. В этом случае реле КLП выводится из действия, а его контакт КLП3 остаётся замкнутым. По цепи КLП3 – КLУ3 подаётся командный импульс механизму изменения частоты вращения Убавить.
Реле времени ограничивает длительность командного импульса некоторым предельным значением. Это время устанавливается 0.2–0.3 с. Резистор R37 – регулировочный. При изменении его сопротивления изменяется напряжение на обмотке реле КТ и ёмкости конденсатора С19, чем обеспечивается регулировка выдержки времени реле КТ и продолжительность командного импульса на двигатель изменения частоты вращения турбины.
Недостатки АСТ-4:
· Данный БПС сводит ωS к 0, это может привести к затягиванию процесса синхронизации, т.к. при очень малых скольжениях синхронизатор отказывает в действии.
· Чувствительность синхронизатора к несходству амплитуд синхронизируемых напряжений. БПС при большой разнице синхронизируемых напряжений может отказать в действии по причине невозврата в исходное состояние. При больших ΔU возрастает ΔtОП и возникает угловая погрешность включения. В случае ΔU>10% действие синхронизатора запрещается.
· ωS постоянно изменяется, следовательно, изменяется δОП.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.