Реальный результат моделирования, это значение переменных в вольтах (машинное решение) делённое на масштабный коэффициент. Исследовать процессы можно в реальном, замедленном и ускоренном времени.
m(t)= t /t[см/с], (7.4)
где m(t)=1 - реальный процесс;
m(t)>1 - замедленный процесс;
m(t)<1 - ускоренный процесс.
Прежде чем начинать работать на машине, нужно составить математический оригинал задачи (исходное математическое уравнение) и через масштабные, раннее определённые, коэффициенты преобразовать исходное уравнение в машинное.
Для моделирования нелинейных зависимостей машина оборудована съёмными комбинированными блоками нелинейности, которые в одном случае нелинейность заменяют совокупностью отрезков, а в другом случае могут делить, умножать две функциональные зависимости.
Составив наборную схему, реализуют её в машине, а затем используют сигнал для записи тот, который требуется по условию решения задачи. Эти сигналы (машинные) появляются на выходах соответствующих усилителей. Сделав запись, преобразуют машинные сигналы в реальные через машинные коэффициенты. По полученным результатам делается анализ процесса, выводы и предложения с заключением. По окончании работ машина выключается, схема разбирается. Особенность работы аналоговой машины МН-7 в том, что усилители без обратной связи выходят из строя.
7.3 Описание работы аналоговой машины применительно к тяговому режиму двигателя электровоза
Тяговый режим электровоза характеризуется изменением скорости под действием сил воздействующих на поезд. Совокупность этих сил определяет основное уравнение движения тела, в частности поезда.
![]() ,
(7.5)
,
(7.5)
![]()
![]() (7.6)
(7.6)
![]()
Алгоритм моделирования требует замены нелинейных функций линейными (кусочная аппроксимация). Соотношение между реальными и масштабными параметрами устанавливается машинными коэффициентами.
Например, масштаб по скорости устанавливается путём деления максимального значения машинного напряжения на максимальную скорость. Для нашего примера максимальное машинное напряжение равно 100 Вольтам, а максимальное значение скорости равно 100 км/ч.
 ,
(7.7)
,
(7.7)
В результате вычисления получаем коэффициент равный единице.
Аналогично, определения
коэффициентов проводятся и с ускорением ( ),
путём (
),
путём ( ) и временем (
) и временем ( ).
).
Разницу между силой тяги электровоза и общим сопротивлением движению поезда определяет ускоряющая сила), а создаёт ускорение поезда). Когда ускорение возрастает или убывает, движение поезда неустойчиво. Эти постулаты являются основой для разработки схемы моделирования с последующим её набором на аналоговой машине.
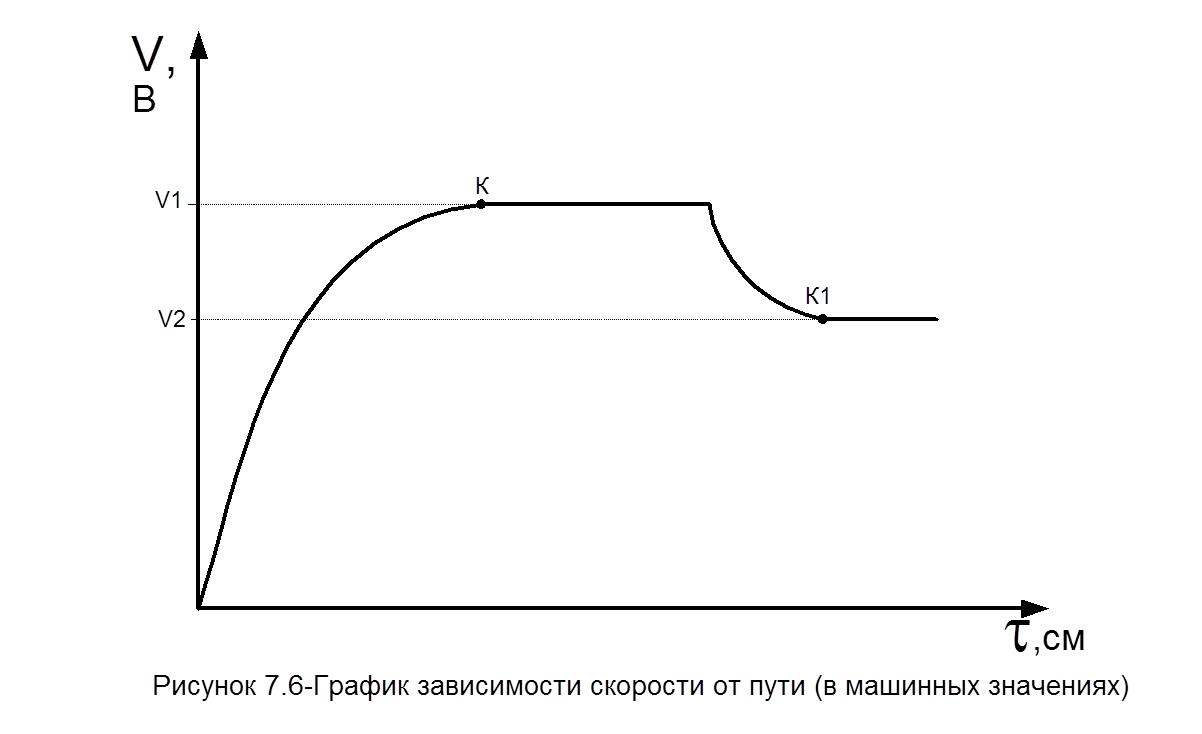
Чтобы вывести систему (поезд) из равновесного состояния, каковым является движение с постоянной скоростью, нужно изменить (искусственно) величину ускоряющей силы (положение точки К1 на рисунке 7.6), тогда поезд будет замедляться. Скорость от значения V1 будет снижаться до значения V2 и в точке К1 она опять станет постоянной.
Сам поезд не может перейти в новое положение. Требуется воздействие внешних сил (например, спуск или подъём).
Изложенная методика является основой движения поезда по реальному участку и положена в основу проектирования электроподвижного состава и при создании учебно-тренировочных комплексов.
На учебно-тренировочном стенде моделируются многие процессы, происходящие на электроподвижном составе, в частности процесс изменения скорости поезда, изменение напряжения на зажимах тягового двигателя при ступенчатом и плавном регулирования и т. д. Перед включением электровоза в работу, необходимо правильно выполнить служебные операции, привести защиту локомотива в рабочее состояние, выполнить требования по технике безопасности,
разблокировать контроллер машиниста, проверить работоспособность тормозов и в
соответствии с указаниями светофоров и системы сигнализации привести поезд в
движение.
На стенде предусмотрена возможность, смоделировать ситуацию, когда скорость равна нулю при высоких токах и напряжении.
7.4 Моделирование текущей скорости поезда
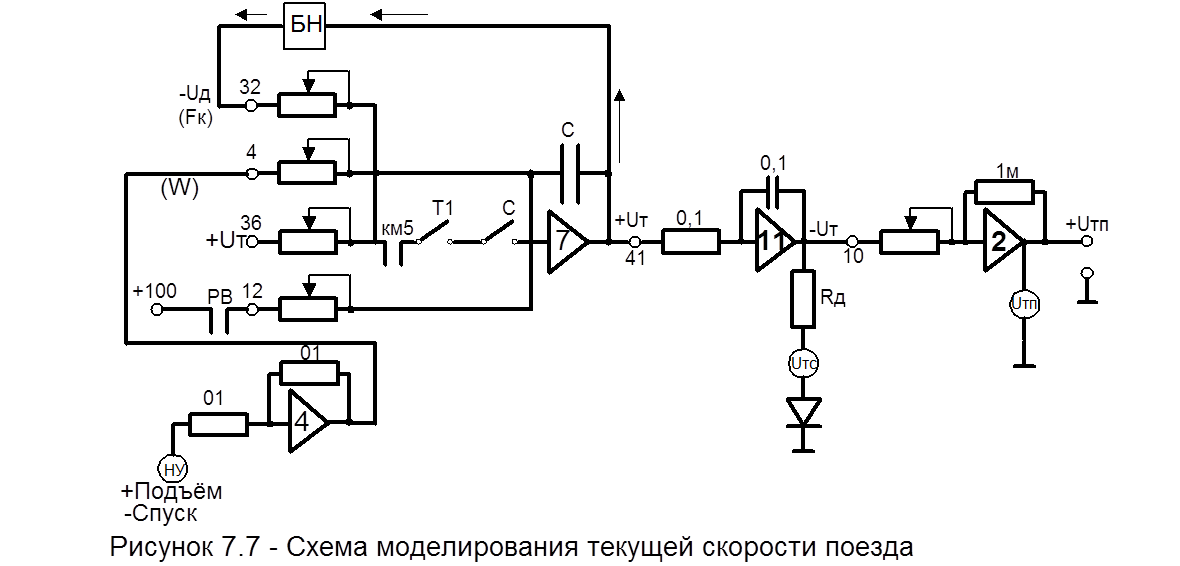
На рисунке 7.7 изображена собранная схема для моделирования текущей скорости. На вход седьмого интегратора подаётся напряжение пропорциональное тяге электровоза, сила основного сопротивления движению поезда(W) и обратная отрицательная связь по текущему значению скорости. На стенде смонтированы приборы, фиксирующие скорость электровоза показывающие значения на пульте студента и преподавателя.
В учебных целях предусмотрена возможность смоделировать ситуацию, когда к двигателю подаётся энергия (на зажимах двигателя присутствует напряжение), но состав заторможен. В ситуации, когда поезд расторможен, в условиях, когда к двигателю подаётся электрическая энергия, будет происходить разгон поезда. В этом случае характеристика изменения тока будет подчинятся уравнению 7.8.
 ,
(7.8)
,
(7.8)
при V=0,
где Е=СVФ, В
При наличии скорости, ток двигателя меняется по классической зависимости(рисунок 7.8).
 |
На стенде моделирования предусмотрена возможность искусственного размыкания цепи двигателя (на рисунке 7.9-контактор «Т»). В этом случае напряжение на зажимах двигателей присутствует, тока нет, тяги нет и соответственно скорости тоже нет.
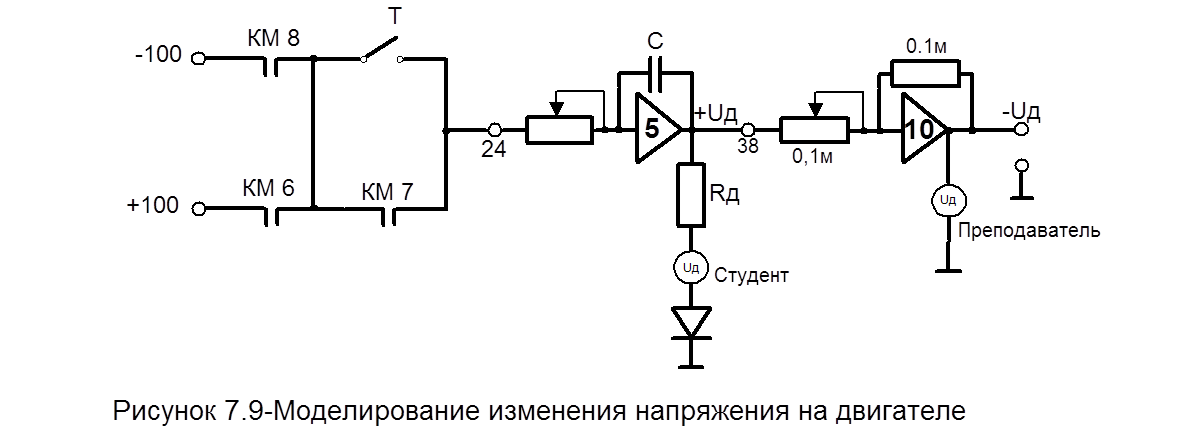
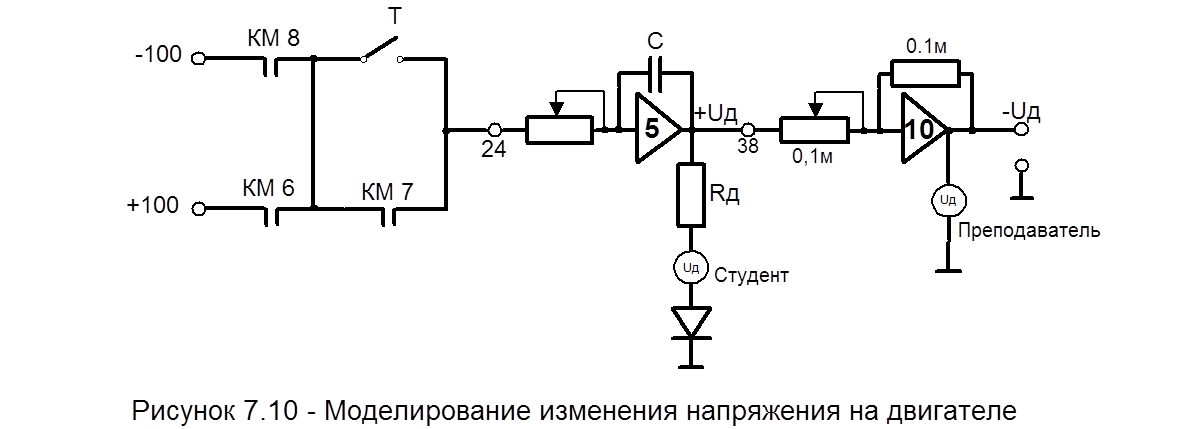
Подобным образом производится моделирование изменения напряжения на
двигателе (рисунок 7.10).
В этой схеме контактор 8(КМ 8), при замыкании имитирует включённое положение “АП” и “РП” ручки контроллера машиниста, контактор 6 (КМ6) положение ручки контроллера “РВ” и “АВ”, и контактор КМ7 положение “АВ”, “ФВ”, “ФП” и “АП”.
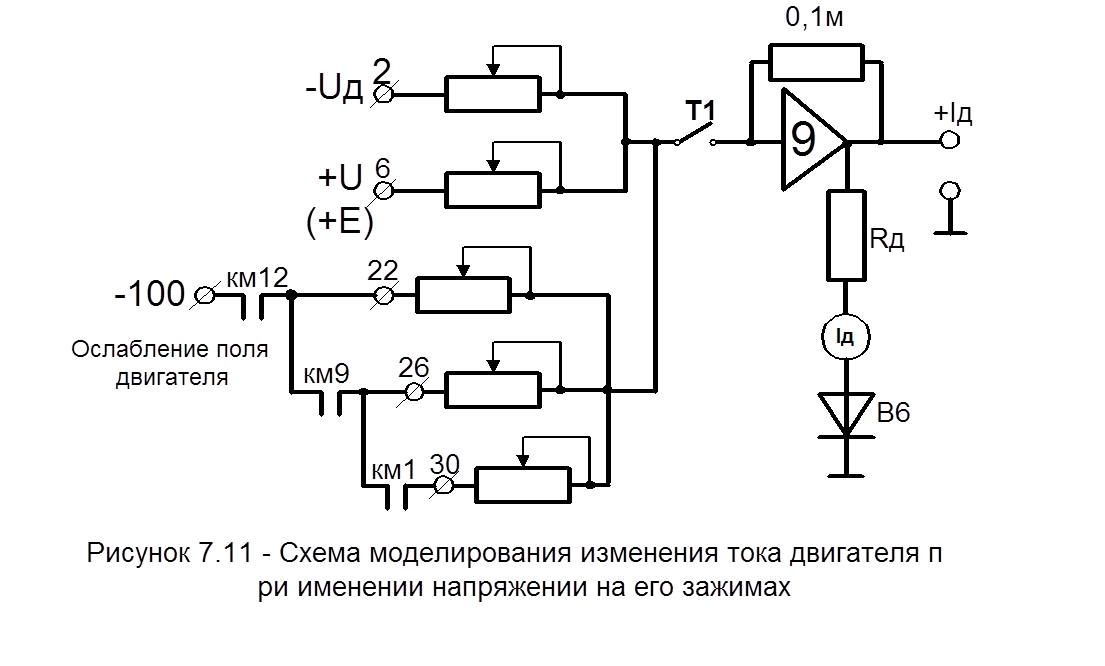
Изменение тока двигателя при изменении напряжения на его зажимах также моделируется на машине МН-7. Схема при которой производится моделирование показана на рисунке 7.11. Здесь контактор КМ12 отвечают за включение ослабления поля ОП1, ОП2, ОП3, контактор КМ9 за включение ОП3 и ОП2, и контактор КМ1 за ВП, ОП1, ОП2, ОП3. Контактор КМ9 имитирует работу реверсивного вала КМ.
На реальном электровозе внешняя характеристика преобразователя имеет линейный падающий характер, значит, и двигатель будет питаться точно также, следствием является изменение величины ускорения поезда. Эта особенность изменения ускорения поезда на практике незаметна, потому что она компенсируется большой массой (инерцией) поезда. К тому же квалифицированные машинисты стараются сократить время работы на каждой позиции, учитывая условия разгона поезда (хорошо, когда поезд разгоняется медленно, но скорее сгорит проводка). Малое время работы на каждой позиции позволяет считать, что напряжение на двигателе практически постоянно. Если такое допущение нельзя принять, тогда нужно учитывать падение напряжения на двигателях используя внешнюю характеристику преобразователя.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.