Далее доработаем программу и проверим, как влияет количество интервалов на соотношение точности алгоритма Уоллиса на 1 и 3 шаге. На рисунке 9 отражена зависимость количества точек в отрицательных части оси координат графика, отражающего разность оценок на первом и третьем шагах.
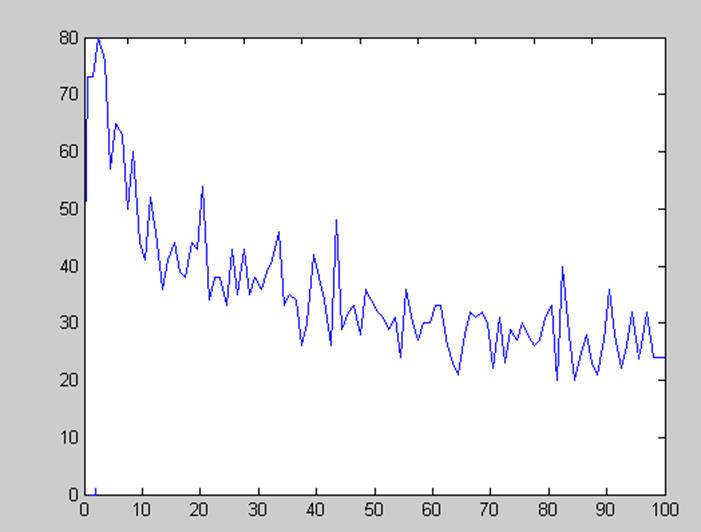
Рисунок 9. – Зависимость количества точек в отрицательных части оси координат графика, отражающего разность оценок на первом и третьем шагах
Невооруженным глазом видно, что количество точек с ростом периодов уменьшается по экспоненте.
РЕАЛЬНЫЙ ПРИМЕР
Вектор X – Вложения в ценные бумаги; Y – прибыль.
|
Прибыль |
Вложения в рекламу |
|
140 |
40 |
|
145 |
41 |
|
147 |
41.6 |
|
152 |
42 |
|
160 |
46 |
|
161 |
46.6 |
|
163 |
47 |
|
162 |
45 |
|
152 |
43 |
|
138 |
41 |
|
140 |
41.5 |
|
141 |
42.2 |
|
143 |
43.3 |
|
144 |
44 |
|
148 |
44.2 |
|
149 |
42 |
|
151 |
41 |
|
151.3 |
39 |
|
151.5 |
38 |
|
151.8 |
37.4 |
|
152 |
37.2 |
|
152.2 |
36.5 |
|
152.6 |
36 |
|
153 |
35.5 |
Текст программы под реальные данные.
Файл cycle:
function [ x1 ] = cycle(Y0,sigma,step,n,X,bn1,bn2,bn3,bn4,X0)
beta_vector=[]
b_vector=[]
kolvo=0
y_vector=[]
Z3=[
1 41 41.5
1 41.5 42.2
1 42.2 43.3
1 43.3 44
1 44 44.2
]
Z4=[
1 44.2 42
1 42 41
1 41 39
1 39 38
1 38 37.4
1 37.4 37.2
1 37.2 36.5
1 36.5 36
1 36 35.5
]
Z2=[
1 47 45
1 45 43
1 43 41
]
Z1=[
1 39 40
1 40 41
1 41 41.6
1 41.6 42
1 42 46
1 46 46.6
1 46.6 47
]
XF1=[
1 140 40
1 145 41
1 147 41.6
1 152 42
1 160 46
1 161 46.6
1 163 47
]
XF2=[
1 162 45
1 152 43
1 138 41
]
XF3=[
1 140 41.5
1 141 42.2
1 143 43.3
1 144 44
1 148 44.2
]
XF4=[
1 149 42
1 151 41
1 151.3 39
1 151.5 38
1 151.8 37.4
1 152 37.2
1 152.2 36.5
1 152.6 36
1 153 35.5
]
%Z=[1 X0 X(1)];
%for i= 2 : n
% Z(i, 1) = 1;
% Z(i, 2) = X (i-1);
% Z(i, 3) = X (i);
%end
%Z; % Formed Z
y = 1;
%------------------Тестируем предположение---------------------------
%7 3 10 4
Y1(1)= ModelM (bn1, Y0, X(1), sigma);
%y_vector=Y(1);
for m= 2 : 7
Y1(m,1)= ModelM (bn1, Y1(m-1), X(m), sigma);
% XF(i,1:3)=[1 Y(i-1) X(i)];
end
beta = inv(Z1'*XF1)*Z1'*Y1;
veta = Y1 - XF1*beta;
sum1 = 0;
sum2 = 0;
for t = 2: 7
sum1=sum1+(veta(t)*veta(t-1))/(7-1);
end
for t = 1: 7
sum2 = sum2 + (veta(t)^2)/7;
end
r = sum1/sum2 + 3/7;
r;
%%%%%% 3 punkt - poluchenie matricy ocenki
for i = 1: 7
for j = 1: 7
omega(i,j) = r^(abs(i-j));
end
end
omega;
b = inv(XF1'*inv(omega)*XF1)*XF1'*inv(omega)*Y1;
Y1(1)= ModelM (b, Y0, X(1), sigma);
for m= 2 : 7
Y1(m,1)= ModelM (b, Y1(m-1), X(m), sigma);
% XF(i,1:3)=[1 Y(i-1) X(i)];
end
%plot([1:7]',Y1,'b.:',[1:7]',XF1(:,2),'sr-');
%----------------------------------------------
Y2(1)= ModelM (bn2, Y1(7), X(8), sigma);
%y_vector=Y(1);
for m= 2 : 3
Y2(m,1)= ModelM (bn2, Y2(m-1), X(m+7), sigma);
% XF(i,1:3)=[1 Y(i-1) X(i)];
end
beta = inv(Z2'*XF2)*Z2'*Y2;
veta = Y2 - XF2*beta;
sum1 = 0;
sum2 = 0;
for t = 2: 3
sum1=sum1+(veta(t)*veta(t-1))/(3-1);
end
for t = 1: 3
sum2 = sum2 + (veta(t)^2)/3;
end
r = sum1/sum2 + 3/3;
r;
%%%%%% 3 punkt - poluchenie matricy ocenki
omega=[];
for i = 1: 3
for j = 1: 3
omega(i,j) = r^(abs(i-j));
end
end
omega;
b = inv(XF2'*inv(omega)*XF2)*XF2'*inv(omega)*Y2;
Y2(1)= ModelM (b, Y1(7), X(8), sigma);
for m= 2 : 3
Y2(m,1)= ModelM (b, Y2(m-1), X(m+7), sigma);
% XF(i,1:3)=[1 Y(i-1) X(i)];
end
%plot([1:3]',Y2,'b.:',[1:3]',XF2(:,2),'sr-');
%----------------------------------------------
Y3(1)= ModelM (bn3, Y2(3), X(11), sigma);
%y_vector=Y(1);
for m= 2 : 5
Y3(m,1)= ModelM (bn3, Y3(m-1), X(m+10), sigma);
% XF(i,1:3)=[1 Y(i-1) X(i)];
end
beta = inv(Z3'*XF3)*Z3'*Y3;
veta = Y3 - XF3*beta;
sum1 = 0;
sum2 = 0;
for t = 2: 5
sum1=sum1+(veta(t)*veta(t-1))/(55-1);
end
for t = 1: 5
sum2 = sum2 + (veta(t)^2)/5;
end
r = sum1/sum2 + 3/5;
r;
%%%%%% 3 punkt - poluchenie matricy ocenki
omega=[];
for i = 1: 5
for j = 1: 5
omega(i,j) = r^(abs(i-j));
end
end
omega;
b = inv(XF3'*inv(omega)*XF3)*XF3'*inv(omega)*Y3;
Y3(1)= ModelM (b, Y2(3), X(11), sigma);
for m= 2 : 5
Y3(m,1)= ModelM (b, Y3(m-1), X(m+10), sigma);
% XF(i,1:3)=[1 Y(i-1) X(i)];
end
%----------------------------------------------------------
Y4(1)= ModelM (bn4, Y3(5), X(16), sigma);
%y_vector=Y(1);
for m= 2 : 9
Y4(m,1)= ModelM (bn4, Y4(m-1), X(m+15), sigma);
% XF(i,1:3)=[1 Y(i-1) X(i)];
end
beta = inv(Z4'*XF4)*Z4'*Y4;
veta = Y4 - XF4*beta;
sum1 = 0;
sum2 = 0;
for t = 2: 9
sum1=sum1+(veta(t)*veta(t-1))/(9-1);
end
for t = 1: 9
sum2 = sum2 + (veta(t)^2)/9;
end
r = sum1/sum2 + 3/9;
r;
%%%%%% 3 punkt - poluchenie matricy ocenki
omega=[];
for i = 1: 9
for j = 1: 9
omega(i,j) = r^(abs(i-j));
end
end
omega;
b = inv(XF4'*inv(omega)*XF4)*XF4'*inv(omega)*Y4;
Y4(1)= ModelM (b, Y3(3), X(16), sigma);
for m= 2 : 9
Y4(m,1)= ModelM (b, Y4(m-1), X(m+15), sigma);
% XF(i,1:3)=[1 Y(i-1) X(i)];
end
%-------------------------------------------------------
%plot([1:14]',Y3,'b.:',[1:14]',XF3(:,2),'sr-');
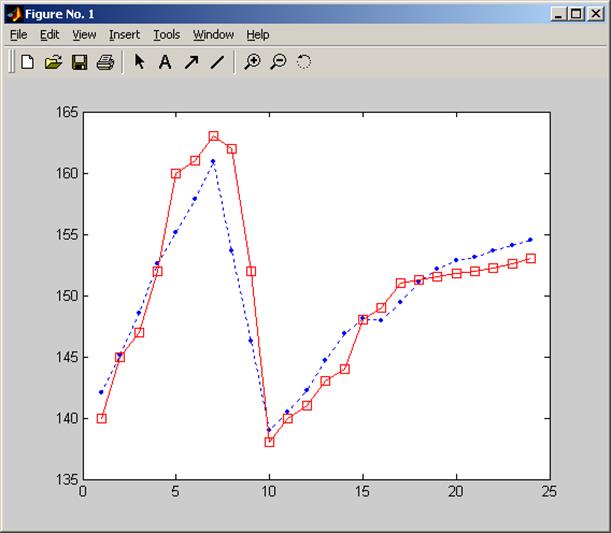
plot([1:24]',[Y1; Y2; Y3;Y4]','b.:',[1:24]',[XF1(:,2); XF2(:,2); XF3(:,2); XF4(:,2)],'sr-');
pause;
%------------------Тестируем предположение------------------------------
%XGraph = [0.01:step:sigma]';
%for sx = 0.01: step: sigma
% That means X=1 Yo X1
%XF=[1 Y0 X(1)];
%b=[1 2 3]
% 1
%m=0;
%Y(1)= ModelM (bn, Y0, X(1), sigma);
%y_vector=Y(1);
%for m= 2 : n
% Y(m,1)= ModelM (bn, Y(m-1), X(m), sigma);
% XF(i,1:3)=[1 Y(i-1) X(i)];
%end
%Z;
%XF;
%beta = inv(Z'*XF)*Z'*Y;
%%%%%% 2 punkt - poluchenie coefficienta autocorrelacii
%veta = Y - XF*beta;
%sum1 = 0;
%sum2 = 0;
%for t = 2: n
% sum1=sum1+(veta(t)*veta(t-1))/(n-1);
%end
%for t = 1: n
% sum2 = sum2 + (veta(t)^2)/n;
%end
%r = sum1/sum2 + 3/n;
%r;
%%%%%% 3 punkt - poluchenie matricy ocenki
%for i = 1: n
% for j = 1: n
%% omega(i,j) = r^(abs(i-j));
% end
%end
%omega;
%b = inv(XF'*inv(omega)*XF)*XF'*inv(omega)*Y;
%beta_vector=[beta_vector beta];
%b_vector=[b_vector b];
%sum_beta(y) = (bn-beta)'*(bn-beta);
%sum_b(y) = (bn-b)'*(bn-b);
%y = y+1;
%end %sigma
%x1 =[sum_b;sum_beta];
%plot(XGraph,beta_vector);
%pause;
%plot(XGraph,b_vector);
%pause;
%pause;
%TIME = ;
%plot([1:n]',Y,'b.:',[1:n]',XF(:,2),'sr-');
end
%pause
Файл main:
function [ x ] = mainM()
% Задаем исходные дынные
%-------------------------------
Y0=139;
sigma=0.25;
step = 0.01;
n=24
X0=39.000;
X=[
40
41
41.6
42
46
46.6
47
45
43
41
41.5
42.2
43.3
44
44.2
42
41
39
38
37.4
37.2
36.5
36
35.5
];
T=24
kolvo_vector=[]
%-------------------------------
%for n = 1: T
bn1=[0.0001 1 0.1021]';
bn2=[0.0001 1 -0.165]';
bn3=[0.0001 1 0.045]';
bn4=[0.0001 1 0.02]';
%kolvo=0;
%X = [1:n]';
S=cycle(Y0,sigma,step,n,X,bn1,bn2,bn3,bn4,X0);% Ищем решение
%graphik(step,sigma,S(1,:),S(2,:));% Строим график
%for n = 1: length (S(1,:)-S(2,:))
%if (S(2,n)-S(1,n))<0
% kolvo=kolvo+1
%end
%end
%kolvo_vector=[kolvo_vector kolvo]
%end
%plot(X',kolvo_vector)
Файл graphik:
function [ output_args ] = graphik(step,sigma,sum_b,sum_beta )
XGraph = [0.01:step:sigma]';
sum_b;
sum_beta;
%Building graph
plot(XGraph,sum_b,XGraph,sum_beta)
%pause
plot(XGraph,(sum_beta-sum_b))
pause
Выводы: в ходе проделанной работы мы реализовали алгоритм Уоллиса в среде Matlab и оценили с его помощью параметров уравнения с лагом. Также мы на практике убедились в справедливости вывода Уоллиса о меньшей смещенности его оценки по сравнению с оценкой, получаемой с помощью инструментальной переменной.
Список литературы:
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.