Регистры на J-K триггерах D- триггерах.
Регистр – совокупность триггерных схем, объединенных общими цепями управления и применяемые для приема, преобразования и передачи информации. Часто регистры используют для преобразования информации последовательного вида в параллельную и наоборот. В зависимости от способа ввода и представления информации регистры делятся на последовательные (сдвиговые), параллельные и последовательно – параллельные. В зависимости от направления движения сигналов регистры делятся на регистры прямого сдвига и реверсивные. Отдельные триггеры, входящие в состав регистра – разряды регистра.
Сдвигающие регистры.
Такие регистры строятся из синхронных триггерных схем, соединенных последовательно, ток что выходной сигнал предыдущего триггера поступает на информационный вход последующего. Все триггеры управляются общим сигналом синхронизации. Для построения сдвигающего регистра на потенциальных элементах необходимы триггеры, синхронизуемые фронтом – двухступенчатые триггеры, так как в них выходные сигналы не меняются во время действия синхроимпульса. В регистрах сдвига могут применяться любые двухступенчатые триггеры: (R-S, D, J-K). Но все они работают в режиме D – триггера, который, как известно после воздействия на него синхроимпульса устанавливается в состояние, определяемое D – входом.
Регистр на D – триггерах.
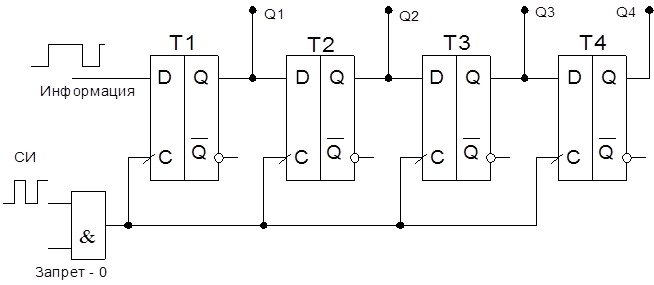
Пример временной диаграммы записи информации в регистр.
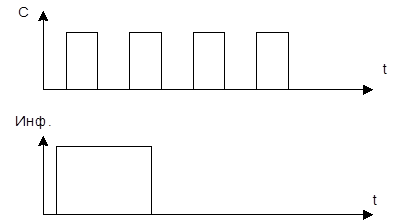
На информационный вход поступает информация в последовательном виде во времени. На вход С – синхроимпульсы. Каждый синхроимпульс сдвигает информацию только на один разряд. По окончании передачи слова подача синхроимпульсов должна быть запрещена, например вентилем 2И.
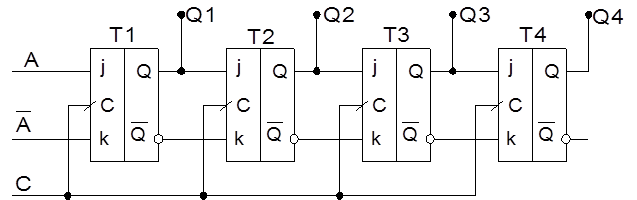
Регистр на J-K триггерах.
Работа J-K триггеров в этом соответствует работе D – триггеров. На информационном входе сигнал должен быть установлен до рабочего фронта синхроимпульса – до спада для J-K регистра. После записи информацию можно считывать в параллельном виде, или подать в другое приемное устройство, использующее синхроимпульсы и выход Q4.
Параллельно-последовательный регистр используется для записи информации в параллельном и последовательном виде.
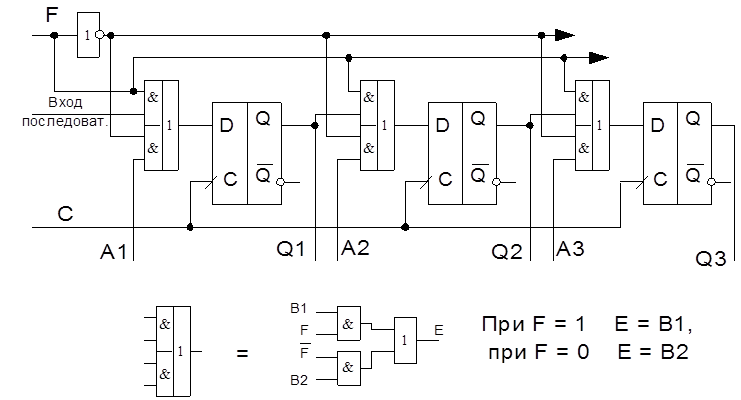
Последовательно – параллельный регистр.
Уровень логического сигнала на входе F определяет режимы работы регистра. Лог.1 на этом входе соответствует режиму записи со входа последовательной информации, при лог.0 на входе F по фронту импульса синхронизации С происходит параллельная запись со входов А1, А2, А3 … . Логический элемент 2*2И/ИЛИ контролирует движение информации. По близкой схеме сделана микросхема 555ИР1 – 4-х разрядный универсальный регистр. Отличие состоит в более сложной схеме тактирования. Имеется 2 входа тактирования: один для параллельной записи, другой – для последовательной и они связаны логикой от сигнала «режим».
Реверсивные последовательные регистры. Реверсивный регистр можно получить из предыдущего, попарно соединяя выводы: Q2, A1; Q3, A2; Q4, A3 и т.д. Если режим F = 0, то по каждому импульсу синхронизации происходит сдвиг информации влево, если F = 1, информация в регистре движется вправо.
Вход А3 используется для последовательного ввода информации при сдвиге влево
Понятие о двунаправленной шине. Универсальный регистр.
В цифровой электронике, где отдельные узлы обмениваются между собой информацией, для связи часто используют двунаправленную шину. При этом каждый из элементов, подключенных к шине, может работать в режиме приема и передачи информации. Чтобы исключить конфликты между выходами элементов, параллельно подключенных к этой шине, (малое выходное сопротивление вентиля!) выходы этих элементов имеют состояние с высоким выходным сопротивлением – третье состояние. В этом режиме выходное сопротивление вентиля очень велико и выход практически не нагружает шину. Это режим включается по отдельному входу микросхемы обычно от центрального процессора. В режиме передачи информации от одного узла к другому выходы всех элементов, кроме передающего, находятся в высокоимпедансном, третьем состоянии. Входы всех элементов подключены к шине, но разрешение на запись передается только тому элементу, который принимает информацию. Сигналы тактирования обычно поступают на входы синхронизации всех элементов. Режим работы каждого из элементов задается также центральным процессором.
Примером элемента, способного работать на двунаправленную шину в таком режиме может служить регистр, рассматриваемый ниже. Этот регистр в зависимости от состояния шин A, B, G, может работать в режимах:
1. Хранение информации А = 0, В = 0, G = 1 (третье состояние)
2. Режим передачи на шину А = 0, В = 0, G = 0
3. Сдвиг влево А = 1, В = 0, G = 1 (третье состояние)
3. Сдвиг вправо А = 0, В = 1, G = 1 (третье состояние)
4. Запись с шины А = 1, В = 0, G = 1 (третье состояние)
Для возможного каскадирования (наращивания разрядности) крайние триггеры регистров имеют отдельные выводы (входы и отдельные выходы без третьего состояния. Универсальный регистр с третьим состоянием на выходе с совмещенными входами и выходами. ИР24, ИР29 в сериях 555, 1533, 1554.
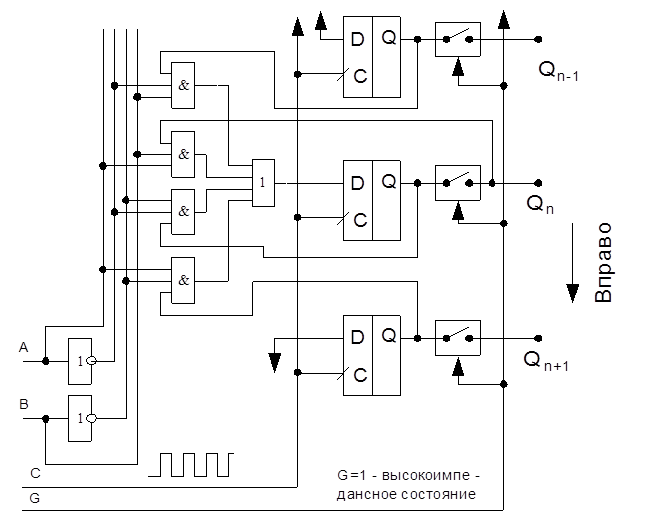 |
Таблица состояния регистра.
|
С |
А |
В |
Операция |
|
|
0 |
0 |
Хранение, или передача на шину |
|
|
0 |
1 |
Сдвиг вправо |
|
|
1 |
0 |
Сдвиг влево |
|
|
1 |
1 |
Загрузка параллельная |
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.

