Министерство образования и науки Российской Федерации
Федеральное агентство по образованию
Государственное образовательное учреждение
высшего профессионального образования
«Комсомольский-на-Амуре государственный
технический университет»
Самолетостроительный факультет
Кафедра МАХП
Расчетно-графическое задание
по дисциплине « Теория механизмов и машин»
на тему: «Анализ и синтез механизмов»
Студент группы 8ТС А.А. Ларин
Преподаватель Г.В. Коннова
2010
Министерство образования и науки Российской Федерации
Государственное образовательное учреждение
высшего профессионального образования
«Комсомольский-на-Амуре государственный технический университет»
Кафедра «Машины и аппараты химических производств»
УТВЕРЖДАЮ
Заведующий кафедрой
___________М.Ю. Сарилов
«___»______________2010г.
Расчетно – графическое задание:
Вариант №____
Дата выдачи задания « 13 » февраля 2010 г
Задание по дисциплине __теория механизмов и машин
на тему «Анализ и синтез механизмов»
____________________________________________________________________
Дополнительные данные:______________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________
Выдано студенту группы 8ТС__________________________________________
Срок сдачи - 16 неделя семестра
Преподаватель Коннова Г.В. __________________
2010
Задание 8
Рычажный механизм Планетарный механизм
Исходные данные: Исходные данные:
размеры звеньев lOA=0,08м., .. nвх.= 1400 об/мин ,
lAB=0,20м., nвых.= 60 об/мин ,
lBC=0,20м., m=3 мм.
lOC=0,16м.,
lBE=0,07м.
ω1=6 (1/c).
вес погонного метра ![]()
сила полезного сопротивления
![]()
положения центров масс звеньев
принять по середине длин звеньев,
моменты инерции звеньев 
Содержание
1. Рычажный механизм. 5
1.1 Структурный анализ рычажного механизма. 5
1.2 Кинематический анализ механизма. 6
1.3 Силовой анализ механизма. 10
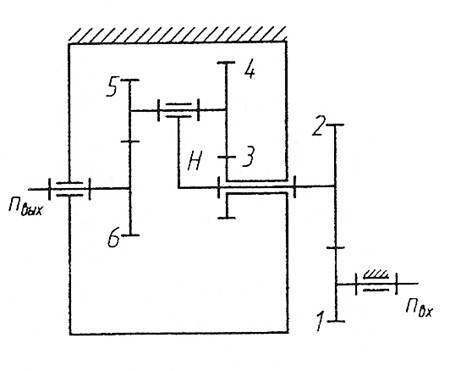
2. Планетарный механизм. 16
2.1 Подбор чисел зубьев по заданному передаточному отношению. 16
2.2 Вычисление радиусов колес. 18
2.3 Построение схемы механизма. 18
2.4 Аналитическое определение частот вращения. 19
2.5 Построение плана линейных скоростей. 19
2.6 Построение плана чисел оборотов. 20
Список используемой литературы. 22
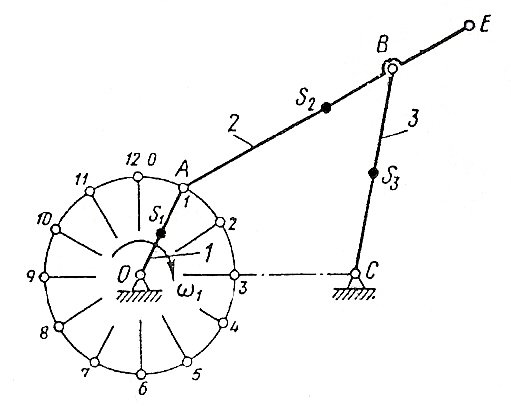
1. Рычажный механизм.
1.1 Структурный анализ рычажного механизма.
 Схема механизма
Схема механизма
Подсчитываю степень подвижности механизма:
Механизм состоит из трех
подвижных звеньев (1,2,3) и одного неподвижного (4). Степень подвижности
механизма определяю по формуле Чебышева: ![]() .
.
Значит в этом механизме одно ведущее звено.
 Разбиваем механизм на группы Ассура.
Разбиваем механизм на группы Ассура.
![]() .
.
группа Ассура II класса, 2 порядка. .
![]()
механизм I класса.
Так как наивысший класс отсоединенной группы второй, то и рассмотренный 4-х звенный механизм II-го класса.
Формула строения механизма.
1.2 Кинематический анализ механизма.
![]() а) Построение планов положений
механизма.
а) Построение планов положений
механизма.
lOA=0,08м.
lAB=0,20м.
lBC=0,20м. ОА = 20 мм.
lOC=0,16м.
lBE=0,07м.
Из точки О радиусом 20 мм. провожу окружность, тогда масштаб построения будет:  .
.
 Из точки С, находящейся на расстоянии 40 мм. от точки О, радиусом СВ=50 мм. провожу дугу α.
Из точки С, находящейся на расстоянии 40 мм. от точки О, радиусом СВ=50 мм. провожу дугу α.
Из точек А, А1, А2, А3, А4, А5 радиусом делаю засечки на дуге α. Получаю точки В, В1, В2, В3, В4, В5, соединив которые с точ-
ками А и С получу соответствующие положения механизма.
Из точек В, В1, В2, В3, В4,
В5 радиусом  делаю засечки на
продолжении звена АВ, получаю точки Е, Е1, Е2, Е3,
Е4, Е5.
делаю засечки на
продолжении звена АВ, получаю точки Е, Е1, Е2, Е3,
Е4, Е5.
б) Построение плана скоростей механизма.
Построение плана скоростей производят на основе теоремы о сложении скоростей. Построение плана ведут с ведущего звена.
![]() т.к. точка О
неподвижна.
т.к. точка О
неподвижна.
 Из полюса pпровожу
линию
Из полюса pпровожу
линию ![]() звену АО и откладываю отрезок pa=80мм.
звену АО и откладываю отрезок pa=80мм.
Тогда масштаб плана скоростей
Точка В вместе со
звеном 2 может совершать вращательное движение вокруг точки А и вместе
со звеном 3 вокруг точки С. Следовательно можно записать два векторных
уравнения: 
Согласно первому
уравнению системы из точки а провожу линию ![]() звену АВ, а согласно второму уравнению системы нужно
из точки р провести линию
звену АВ, а согласно второму уравнению системы нужно
из точки р провести линию ![]() звену ВС, на пересечении
линий получаю точку b
и отрезки изображающие относительные скорости. Тогда отрезок ab -
звену ВС, на пересечении
линий получаю точку b
и отрезки изображающие относительные скорости. Тогда отрезок ab - ![]() , pb -
, pb - ![]() .
.
![]()

Угловые скорости звеньев будут:
Чтобы найти направление ω2 нужно вектор ![]() перенести
параллельно самому себе в точку В механизма и потянув за вектор
установить в какую сторону поворачивается звено 2, в ту же сторону и будет
направлена ω2. Аналогично для ω3 .
перенести
параллельно самому себе в точку В механизма и потянув за вектор
установить в какую сторону поворачивается звено 2, в ту же сторону и будет
направлена ω2. Аналогично для ω3 .
Для определения скорости
точки С воспользуюсь свойством подобия  плана скоростей и плана механизма. Для этого необходимо
составить следующую пропорцию:
плана скоростей и плана механизма. Для этого необходимо
составить следующую пропорцию:
Соединив точку е с полюсом р получаю абсолютную скорость точки Е.
![]()
в) Построение плана ускорений механизма.
 т.к.
точка О неподвижна.
т.к.
точка О неподвижна.
Так как точка А
совершает вращательное движение вокруг центра О, то ускорение этой точки
можно записать 
Из точки π проводим линию║ звену АО и откладываю произвольный отрезок равный 80 мм., πа=80 мм.
Тогда масштаб плана ускорений будет равен:
Точка В вместе со
звеном 2 совершает вращательное движение вокруг точки А и вместе со
звеном 3 вокруг точки С, следовательно можно записать следующие
уравнения: 

Отложу величину ![]() в виде отрезка:
в виде отрезка:

Из точки а проведу
линию действия ![]() (||BA).
(||BA).
![]() т.к.
т.к.
![]() , но
, но 

Отложу величину  в виде отрезка:
в виде отрезка:

Из точки π проведу
линию действия (||BC).
 т.к.
т.к.
![]() , но
, но 
На пересечении касательных ускорений точки В нахожу точку b.
Графически найду следующие ускорения:
Угловые ускорения звеньев будут:
Чтобы найти направление ![]() нужно
вектор
нужно
вектор  перенести параллельно самому себе в
точку В механизма и потянув за конец вектора установить в какую сторону
поворачивается звено 2, в эту же сторону направлена
перенести параллельно самому себе в
точку В механизма и потянув за конец вектора установить в какую сторону
поворачивается звено 2, в эту же сторону направлена ![]() .
Аналогично для
.
Аналогично для ![]() .
.
Ускорение точки Е можно определить воспользовавшись свойством подобия. Для этого составлю следующую пропорцию:

Соединив точку е с точкой π найду ускорение точки Е:
![]()
Для определения ускорений центров тяжести звеньев соединю с полюсом середины соответствующих векторов. Графически найду ускорения центров масс звеньев:
1.3 Силовой анализ механизма.
Дано: ![]()
а) Определяю веса и массы звеньев:
Силы веса прикладываются в центрах масс звеньев и направляются вертикально вниз.
б) Определяю силы инерции звеньев и подсчитываю моменты пар сил инерции:
![]()
Силы инерции прикладываются в центрах масс и направляются противоположно ускорениям as .
Момент М2 прикладывается к звену 2 и направляется в противоположную сторону ε2. Аналогично момент М3.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.