





Задание
по курсовому проектированию
1. Тема курсовой работы Система ФАПЧ
2. Срок сдачи законченной работы _________________________________
3. Исходные данные к работе (Зачетная книжка № 990070) параметры задающего воздействия – Х`0 = 0,6 рад/с, Х``0=0;
спектральная плотность шума N=4*10-5 Вт/Гц;
параметры системы: Кд=0,08 В/рад, к=1, n=2, m=0, Т1=1,5 с
область применения – доплеровский измеритель скорости и угла сноса с непрерывным излучением
4. Содержание расчетно-пояснительной записки (перечень подлежащих разработке вопросов):
· Оптимизация системы;
· Построение ЛАХ, ЛФХ и определение запаса устойчивости;
· Цифровое моделирование системы;
· Составление функциональной схемы.
5. Перечень графического материала:
· Функциональная схема системы ФАПЧ;
· Диаграммы и графики, поясняющие работу системы ФАПЧ.
Руководитель Бондаренко В. Н. ___________
Задание принял к исполнению 27.02.02
студент Комаров В.А. ___________
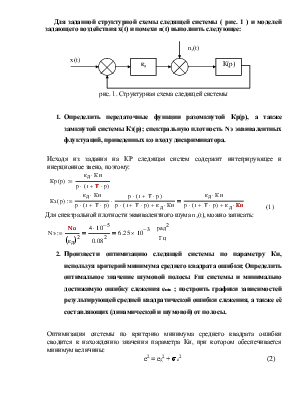
Для заданной структурной схемы следящей системы ( рис. 1 ) и моделей задающего воздействия х(t) и помехи n(t) выполнить следующее:
![]()
nэ(t)


![]()
![]()

![]()
|
|

 |
рис. 1. Структурная схема следящей системы
1. Определить передаточные функции разомкнутой Кр(р), а также замкнутой системы Кз(р); спектральную плотность Nэ эквивалентных флуктуаций, приведенных ко входу дискриминатора.
Исходя из задания на КР следящая систем содержит интегрирующее и инерционное звено, поэтому:
 (1)
(1)
Для спектральной плотности эквивалентного шума nэ(t), можно записать:

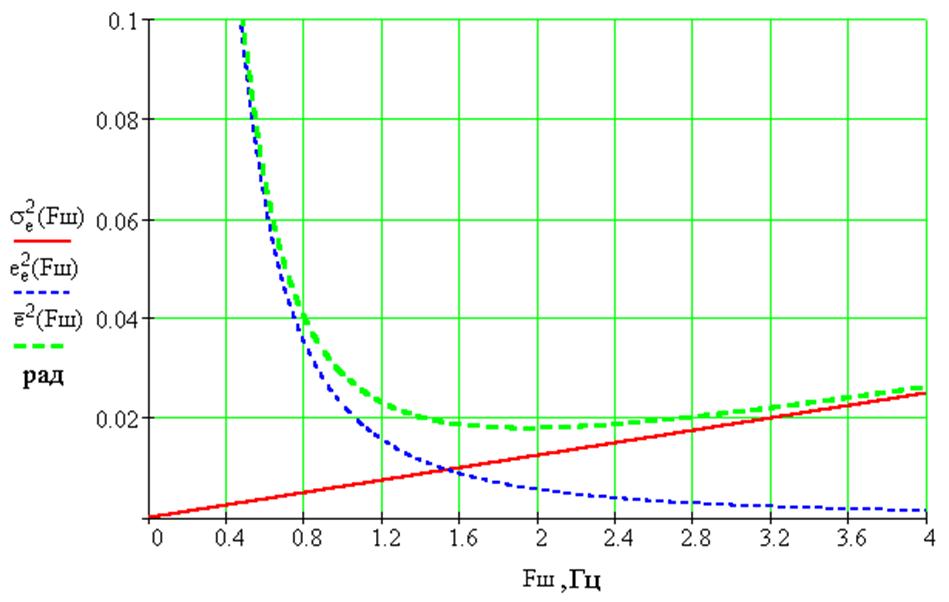
2. Произвести оптимизацию следящей системы по параметру Ки, используя критерий минимума среднего квадрата ошибки; Определить оптимальное значение шумовой полосы Fш системы и минимально достижимую ошибку слежения еmin ; построить графики зависимостей результирующей средней квадратической ошибки слежения, а также её составляющих (динамической и шумовой) от полосы.
Оптимизация системы по критерию минимума среднего квадрата ошибки сводится к нахождению значения параметра Ки, при котором обеспечивается минимум величины:
e2 = eд2 + se2 (2)
Составляющая eд определяет динамическую ошибку, обусловленную инерционностью следящей системы по отношению к меняющемуся задающему воздействию. Составляющая se2 определяет дисперсию шумовой ошибки еп(t), обусловленной помехой n(t). Таким образом, формула (2) определяет средний квадрат результирующей ошибки e(t) = eд(t) + еп(t).
Динамическая ошибка eд(t) определяется параметрами X`0 и X``0 задающего воздействия, а также порядком астатизма (числом интеграторов) и добротностью ситемы:
![]() (3)
(3)
В данном случае система содержит 1 интегратор, поэтому:
eд(t) = X`0/К1
Случайная составляющая еп(t) ошибки определяется статистическими характеристиками помехи n(t) и структурой (а также параметрами) системы. В качестве n(t) будем использовать модель белого шума с равномерной в полосе частот от 0 до ¥ спектральной плотностью (хотя реальный шум имеет ограниченную ширину спектра, однако она во много раз превышает полосу пропускания системы Fш, что позволяет использовать модель белого шума).
Нахождение шумовой полосы системы и дисперсии шумовой ошибки:
сводится к вычислению интеграла:
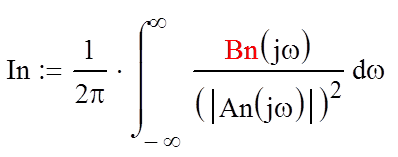 (4)
(4)
Подставим (3) в формулу (1) и заменим р на jw, получаем выражение для комплексного коэффициента передачи замкнутой системы:
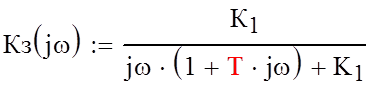 (5)
(5)
Используя (5), запишем квадрат АЧХ системы:
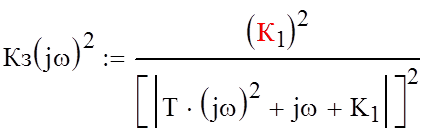 (6)
(6)
Представим (6) в виде отношения полиномов Вn(jw)/½Аn(jw)½2 , где:
А2(jw) = Т*( jw)2+ jw+К1
В2(jw) = К12
Запишем коэффициенты полиномов:
а0 = Т2 а1 = 1 а2 = К1
b0 = 0 b1 = К12
Значение интеграла (4) для порядка дифференциального уравнения, описывающего систему, равного 2 (n=2) вычисляется по формуле:
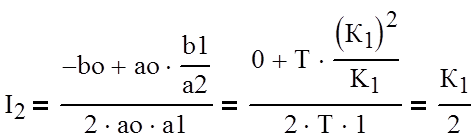
Находим шумовую полосу системы и дисперсию шумовой ошибки:
 (7)
(7)

Для нахождения экстремума среднего квадрата ошибки необходимо продифференцировать выражение (2) по параметру Ки и прировнять производную нулю:

 (8)
(8)
Решая уравнение (8) найдём Ки орt:

Подставив значение Ки орt в (7) определим: оптимальное значение шумовой полосы Fш оpt системы

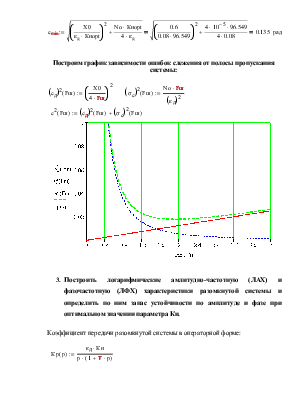
И минимально достижимую ошибку слежения еmin, подставив Ки орt в (2):

Построим график зависимости ошибок слежения от полосы пропускания системы:
3. Построить логарифмические амлитудно-частотную (ЛАХ) и фазочастотную (ЛФХ) характеристики разомкнутой системы и определить по ним запас устойчивости по амплитуде и фазе при оптимальном значении параметра Ки.
Коэффициент передачи разомкнутой системы в операторной форме:
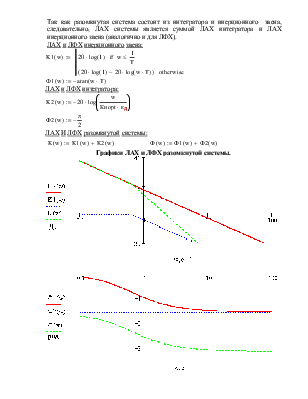
Так как разомкнутая система состоит из интегратора и инерционного звена, следовательно, ЛАХ системы является суммой ЛАХ интегратора и ЛАХ инерционного звена (аналогично и для ЛФХ).
ЛАХ и ЛФХ инерционного звена:

![]()
ЛАХ и ЛФХ интегратора:
ЛАХ И ЛФХ разомкнутой системы:

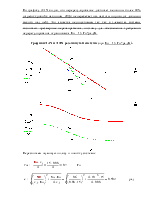
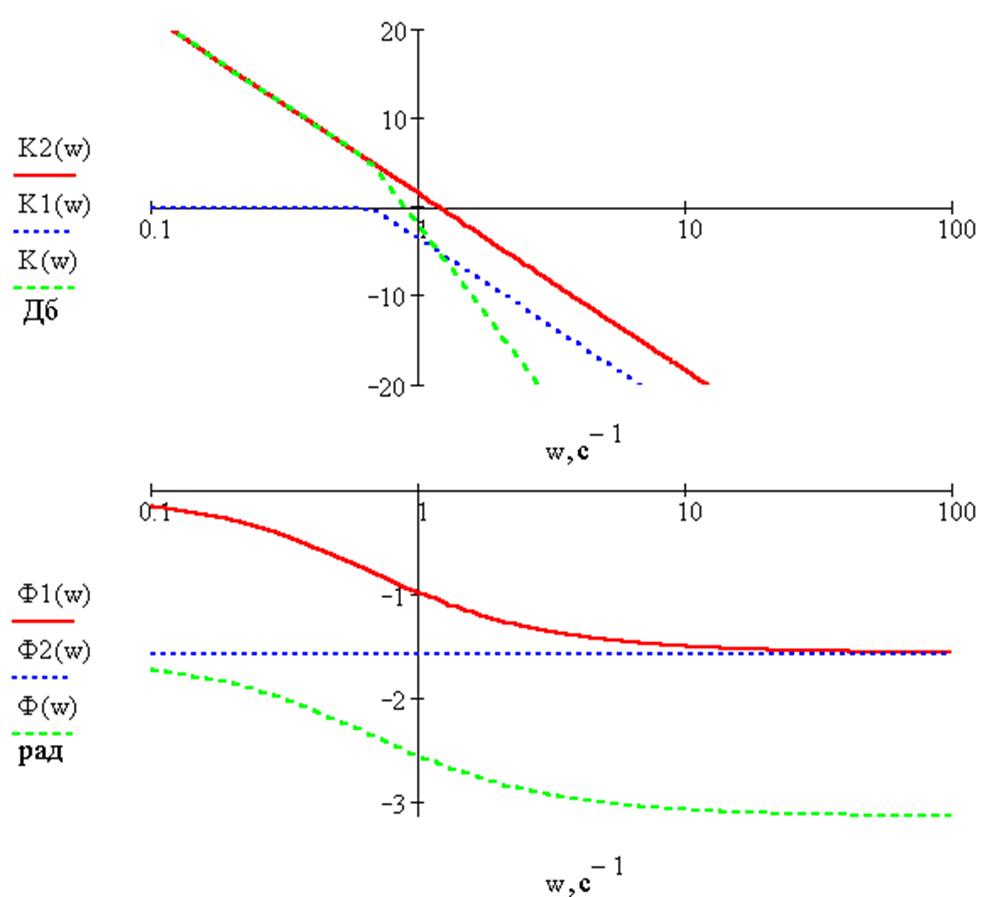
Графики ЛАХ и ЛФХ разомкнутой системы.
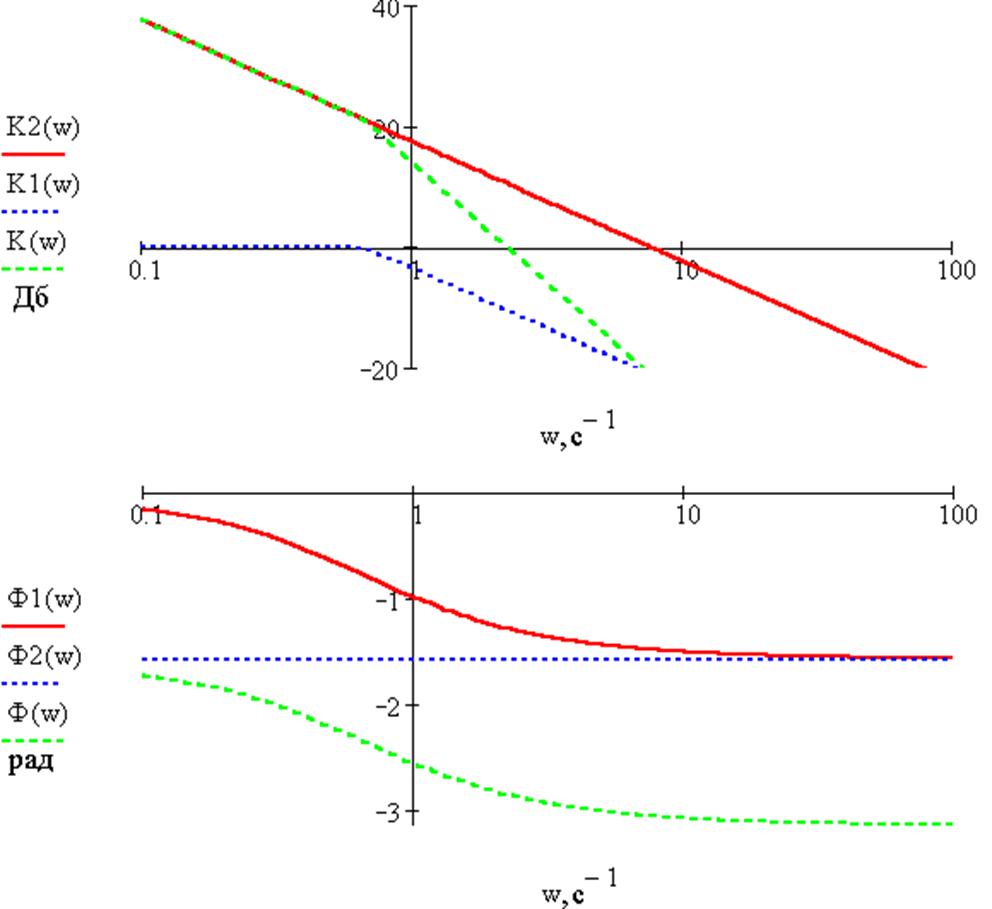
По графику ЛАХ видно, что перерегулирование достигает величины более 30% (отрезок кривой с наклоном –20Дб не пересекает ось частоты и проходит довольно высоко над ней). Это является недопустимым так как в элементах системы возникают чрезмерные перенапряжения, поэтому для обеспечения требуемого перерегулирования ограничимся Ки = 15 Гц*рад/В.
Графики ЛАХ и ЛФХ разомкнутой системы(при Ки = 15 Гц*рад/В).
Пересчитаем шумовую полосу и ошибку системы:


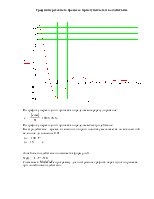
Определимзапас устойчивостипо фазе:
![]()
По графику найдем значение wср ,оно равно 0.9, следовательно:

Данный запас устойчивости считается достаточным, так как DФ>p/6.
Так как ЛФХ системы достигает -p только при w®¥, то запас устойчивости по амплитуде не имеет смысла определять (теоретически он бесконечен).
4. Произвести моделирование следящей системы на ЭВМ при двух типах воздействия: а) ступенчатом; б) линейном; построить графики переходного процесса и определить качественные показатели системы в переходном режиме (быстродействие, перерегулирование).
При моделировании следящей системы воспользуемся методом билинейного преобразования:
Дискретная передаточная функция для ошибки:
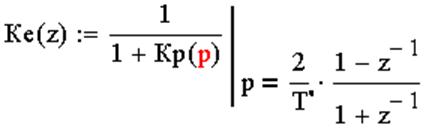 где
где 
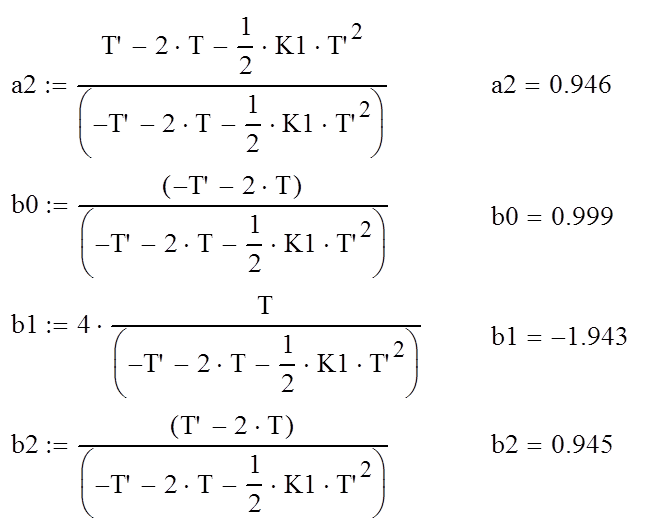
После преобразования получаем:
Находим коэффициенты разностного уравнения ( при Т`=1/40*Fш=0.083 Гц ):
Разностное уравнение ,соответствующее дискретной передаточной функции ошибки имеет вид:
![]()
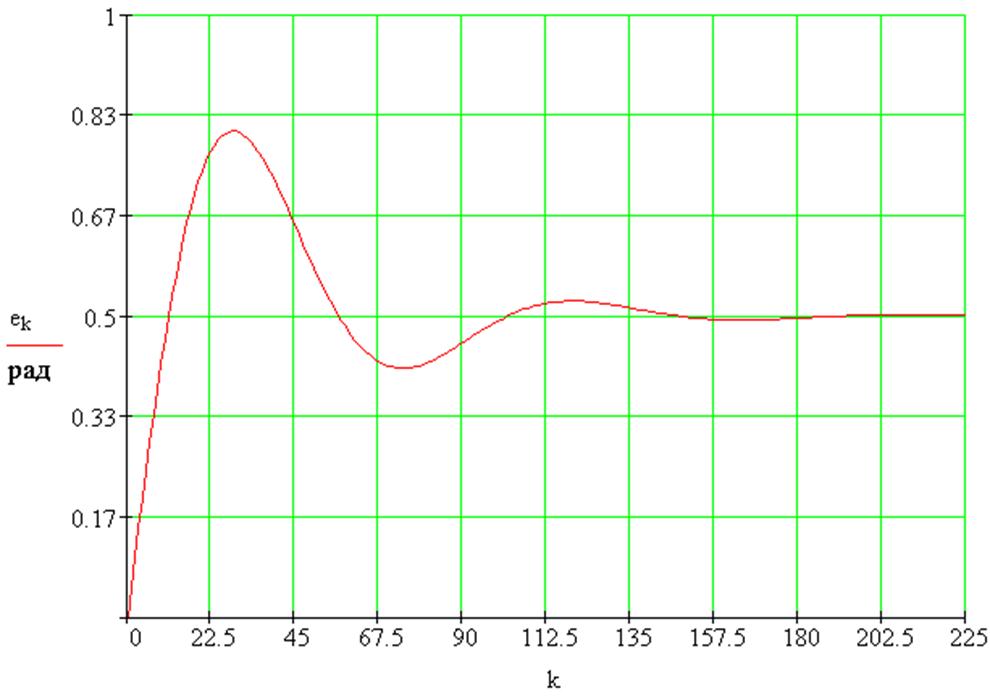
Ступенчатое воздействие:
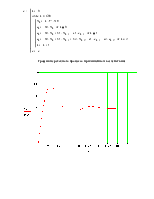
Составим в MathCad`е программу для построения графика переходного процесса при ступенчатом воздействии:
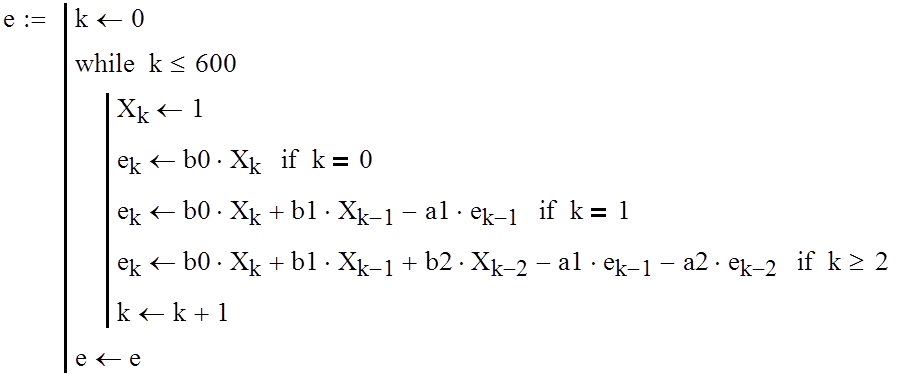
График переходного процесса при ступенчатом воздействии.
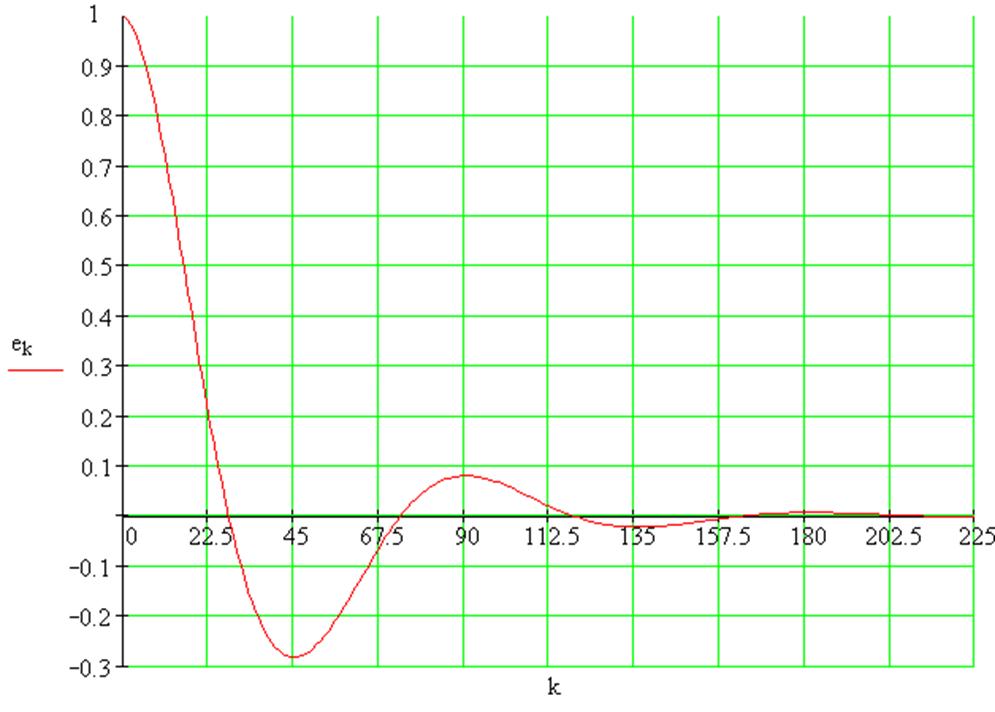
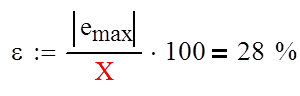
По графику переходного процесса определяем перерегулирование:
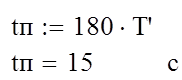
По графику переходного процесса определяем быстродействие:
Быстродействие – время, в течении которого ошибка уменьшается по абсолютной величине до значения 0.01
![]()
Составим в MathCad`е программу для построения графика переходного процесса при линейном воздействии:
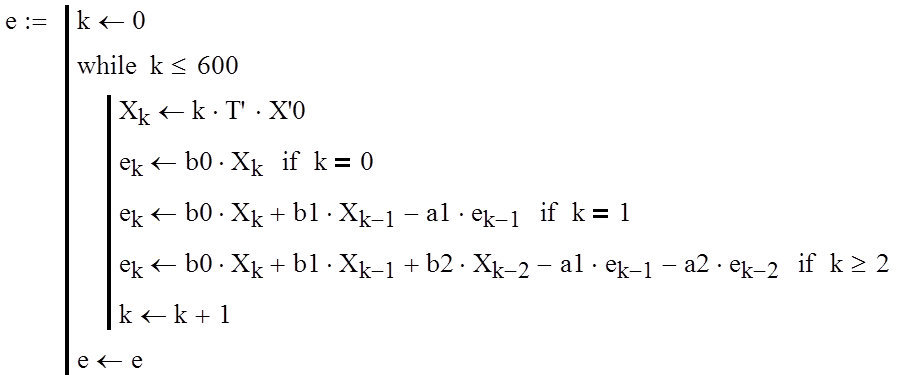
График переходного процесса при линейном воздействии:
5. Составить функциональную схему следящей системы заданного типа (схема должна также содержать функциональные элементы устройства поиска и обнаружения сигнала).
Системы ФАПЧ относятся к классу следящих систем и предназначены для слежения за фазой сигнала (точнее за частотой и фазой).
Рассмотрим применение системы ФАПЧ в качестве доплеровского измерителя скорости с непрерывным излучением.
Передающая антенна излучает в пространство сигнал с частотой f , отражаясь от объекта сигнал получает некоторое изменение частоты, названное частотой Доплера Fд . То есть на приемную антенну приходит сигнал с частотой f+Fд. Затем Fд выделяется на фильтре доплеровской частоты (ФДЧ). С помощью системы ФАПЧ осуществляется стабилизация Fд. То есть в режиме слежения на выходе делителя частоты устанавливается значение Fд, зная зависимость Fд от скорости можно с помощью арифметического устройства произвести пересчет в скорость.
В системе поиска используется фильтр с более узкой полосой пропускания, чем в системе ФАПЧ. С помощью индикатора синхронизма (ИС). Происходит индикация поиска сигнала.
Литература
1. Бондаренко В.Н. Радиоавтоматика: методические указания по курсовому проектированию студентов специальности 2301 –«Радиотехника»; КрПИ. Красноярск, 1992. 32 с.
2. Бондаренко В.Н. Теория управления и радиоавтоматика: Учебное пособие. Красноярск: КГТУ, 1999. 139 с.
3. Первачев С.В. Радиоавтоматика: М.: Радио и связь. 1982. 296 с.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.