|
(12.13) |
![]() .
.
Уравнение напряжений явнополюсного ненасыщенного синхронного генератора может быть представлено и в другом виде. Поскольку магнитная система машины ненасыщена, имеют место следующие зависимости:
![]()
![]() ,
,
где ![]() и
и ![]() — продольная и поперечная составляющие тока обмотки
статора (см. рис. 8).
— продольная и поперечная составляющие тока обмотки
статора (см. рис. 8).
С учетом приведенных уравнений э. д. с. Ead и Еаq могут быть представлены как
|
(12.14) |
где xad и xaq — индуктивные сопротивления обмотки статора, обусловленные соответственно продольной Фаd и поперечной Фаq составляющими магнитного потока якоря (статора).
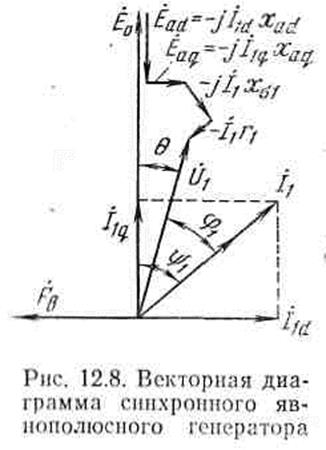
С учетом (12.13) и (12.14) уравнение напряжений явнополюсного синхронного генератора можно записать следующим образом:

Этому уравнению соответствует векторная диаграмма синхронного явнополюсного ненасыщенного генератора при активно-индуктивной нагрузке (рис.8). Из диаграммы следует, что основной причиной, уменьшающей напряжение U1 при подключении нагрузки, является э. д. с. Ead, наведенная магнитным потоком якоря но продольной оси Фш/, который оказывает на машину размагничивающее действие.
Представим ток статора как
|
|
Полученное выражение подставим в (12.15)
тогда уравнение напряжений синхронного явнополюсного генератора приобретет вид
![]()
Здесь xdи хq— полные индуктивные сопротивления синхронного генератора по продольной и поперечной осям.
Из векторной диаграммы, представленной на рис.8, видно, что при работе синхронного генератора на активно-индуктивную нагрузку напряжение U1 <EU , что объясняется главным образом размагничивающим влиянием реакции якоря. Однако при работе генератора на активно-емкостную нагрузку напряжение U1 >EU, что объясняется подмагничивающим действием магнитного потока реакции якоря по продольной оси Фаd.
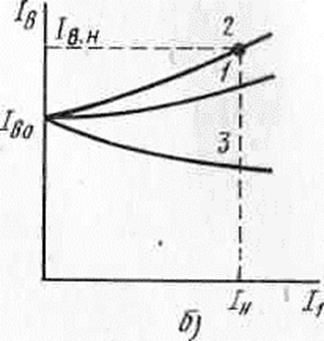
Зависимость напряжения на выводах обмотки статора U1от величины и характера нагрузки I1называется внешними характеристиками синхронного генератора (рис. 9,а):
U1=f(I1) при iB =
const; n1=const; cos![]() 1 = const.
1 = const.
При чисто активной нагрузке (кривая 1) увеличение нагрузочного тока сопровождается сравнительно небольшим уменьшением напряжения, происходящим главным образом за счет падения напряжения на собственном сопротивлении обмотки статора.
![]() При активно-индуктивной нагрузке (кривая 2)
увеличение тока I1 сопровождается
более резким уменьшением напряжения, что объясняется главным образом
размагничивающим действием реакции якоря.
При активно-индуктивной нагрузке (кривая 2)
увеличение тока I1 сопровождается
более резким уменьшением напряжения, что объясняется главным образом
размагничивающим действием реакции якоря.
При активно-емкостной нагрузке (кривая 3) увеличение тока I1 сопровождается ростом напряжения Ul что объясняется намагничивающим действием реакции якоря.
|
|
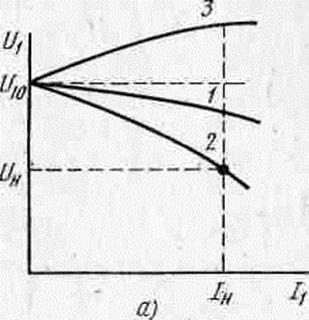
Рис. 9. Внешние и регулировочные характеристики синхронного генератора
На практике обычно требуется постоянное по величине напряжение. Для поддержания его постоянным при изменении нагрузки (тока I1) прибегают, как и в генераторах постоянного тока, к изменению магнитного потока полюсов путем изменения тока возбуждения Iв.
При увеличении тока нагрузки I1 для поддержания U1 постоянным в случае
активной или индуктивной нагрузки приходится увеличивать Iв, а в случае емкостной нагрузки
— уменьшать Iв.
Зависимости Iв =f(I1) при U1=const и cos![]() 1=const называются регулировочными характеристиками. На
рис.9,б представлены регулировочные характеристики синхронного
генератора при активной (1), активно-индуктивной (2) и
активно-емкостной (3) нагрузках.
1=const называются регулировочными характеристиками. На
рис.9,б представлены регулировочные характеристики синхронного
генератора при активной (1), активно-индуктивной (2) и
активно-емкостной (3) нагрузках.
3.1.6. Синхронныйтахогенератор
Конструктивно синхронный тахогенератор представляет собой однофазный синхронный генератор небольшой мощности с ротором, возбуждаемым постоянными магнитами. Благодаря возбуждению постоянными магнитами в синхронном тахогенераторе нет скользящих контактов, что выгодно отличает его от тахогенератора постоянного тока. В процессе работы тахогенератора в обмотке статора наводится э. д. с.
![]() , (12.18)
, (12.18)
где f1 =pn/60— частота э. д. с, наведенной в обмотке статора, Гц; w1—число витков в обмотке статора; kwl — обмоточный коэффициент; Ф — основной магнитный поток, Вб; k — постоянный коэффициент; n — частота вращения ротора, об/мин.
Из выражения (12.18) следует, что э. д. с. тахогенератора пропорциональна частоте вращения. Однако с изменением частоты вращения ротора изменяется и частота выходного напряжения.
Реактивные сопротивления зависят от частоты переменного тока:
![]()
![]()
поэтому влияние частоты вращения ротора тахогенератора на частоту э.д.с. приводит к изменениям полного сопротивления как обмотки статора, так и внешней цепи (нагрузки). В итоге выходная характеристика синхронного тахогенератора UТГ=f(n) становится нелинейной. При ЭТОМ появляется погрешность, снижающая точность работы тахогенератора. Указанный недостаток несколько
ограничивает использование синхронных тнхогепсраторов в системах автоматики. Однако они нее же применяются достаточно широко, так как при малых габаритах имеют значительную по величине мощность на выходе.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.