Зная коэффициент передачи разомкнутой системы:
 (48)
(48)
Определим дискретную передаточную функцию цифровой модели:
 (49)
(49)
 (50)
(50)
 (51)
(51)
 (52)
(52)
 (53)
(53)

 (54)
(54)
 (55)
(55)

Зная что:
 (56)
(56)
Найдем коэффициенты:
 (57)
(57)
 (58)
(58)
 (59)
(59)
 (60)
(60)
 (61)
(61)
Учитывая, что Fш=0,537 Гц, выбираем интервал дискретизации равный T=0,1 c.
Для ступенчатого воздействия:
 (62)
(62)
Для квадратичного воздействия:
 (63)
(63)
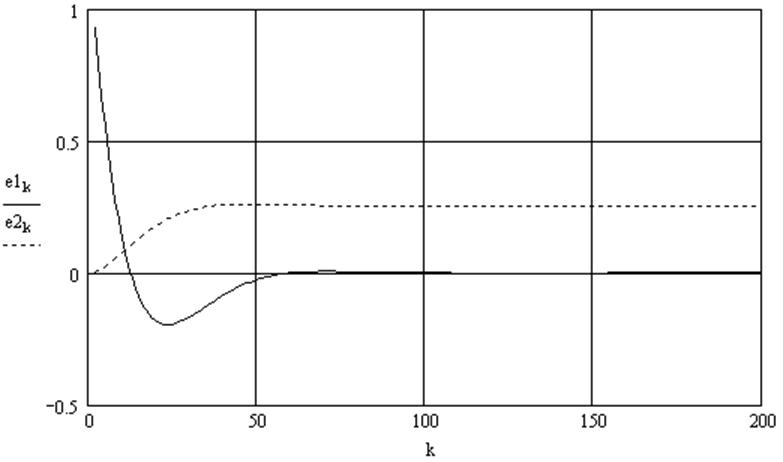
Рисунок 6. Переходной процесс в системе при ступенчатом воздействии (e1k) и при квадратичном воздействии (e2k)
Исследуем параметры переходных процессов по графику:
1) При ступенчатом воздействии: ![]()
Перерегулирование системы:
![]() при k=24 (64)
при k=24 (64)
Время переходного процесса (ошибка уменьшается до 1% при k=55):
![]() (65)
(65)
2) При квадратичном воздействии:
Перерегулирование равно:
![]() (66)
(66)
Установившаяся ошибка слежения:
![]() (67)
(67)
7 Задание 5
Составить функциональную схему следящей системы.
Данная система ССН применяется в моноимпульсной системе с фазовой пеленгации траекторных измерений.
Рисунок 4. Функциональная схема фазового пеленгатора РТС траекторных
измерений.
Список используемых сокращений:
Гет – гетеродин
ГНП – генератор напряжения поиска
Двиг – двигатель
Огр-1 – ограничитель 1
Огр-2 – ограничитель 2
ПУ – пороговое устройство
Ред – редуктор
См-1 – смеситель 1
См-2 – смеситель 2
Ст-1 – суматор 1
Ст-2 – суматор 2
УПЧ-1 – усилитель промежуточной частоты 1
УПЧ-2 – усилитель промежуточной частоты 2
УСО – усилитель сигнала ошибки
ФВ – фазовращатель на π/2
ФД – фазовый дискриминатор
Принцип работы схемы:
Система с фазовой пеленгацией имеет антенну с двумя разнесенными на некоторое расстояние фазовыми центрами. Практически два фазовых центра могут быть получены, например с помощью двух разнесенных антенн. При этом оси диаграмм направлности параллельны. Для получения пеленгационной характеристики с центральной симметрией во втором канале осуществляется дополнительный фазовый сдвиг на угол π/2. Фазы сигналов обоих каналов сравниваются с помощью фазового дискриминатора. Для исключения влияния неодинаковости и нестабильности коэффициентов усиления каналов сигналы ограничиваются на некотором уровне. Сумматор 1 складывает сигналы после УПЧ, далее пороговое устройство сравнивает эту сумму с определенным пороговым напряжением. Если пороговое напряжение превышено, то на генератор напряжения поиска подается сигнал прекращающий его работу. При этом напряжение на выходе генератора должно сохраниться чтобы не произошла потеря цели. Сумматор 2 складывает сигналы с выходов фазового дискриминатора и генератора напряжения поиска, суммарный сигнал подается на усилитель сигнала ошибки, который управляет двигателем поворачивающим антенны.
При неидентичных и нестабильных фазовых характеристиках каналов равносигнальное направление будет определяться с ошибкой, что является существенным недостатком фазового метода.
Выводы
В результате проделанной работы, я ознакомился и овладел методикой, а также навыками анализа, выбора и расчета основных параметров типовых радиотехнических систем. Также изучили принцип действия типовых систем радиоавтоматики.
Для исследования была предложена система автоматического слежения за напрявлением (ССН). ССН нашла широкое применение в радиолокации и радионавигации, на ее основе строятся фазовые пеленгаторы РТС траекторных измерений.
Были рассчитаны параметры радиотехнической следящей системы, проведена ее оптимизация, а также ее цифровое моделирование.
В результате проведения оптимизации системы, были получены следующие величины:
|
Название величины |
Обозначение |
Значение |
|
Оптимальная шумовая полоса |
Fш_opt |
0.537Гц |
|
Дисперсия шумовой ошибки |
σ2e |
0.1863Град2 |
|
Динамическая ошибка |
eд |
0.253Град |
|
Минимально достижимая ошибка слежения |
emin |
0.501Град |
По ЛАХ и ЛФХ разомкнутой системы добились, чтобы запас устойчивости системы удовлетворял условию достаточной устойчивости системы (Δφ>30°).
В результате цифрового моделирования системы, были получены графики переходных процессов при ступенчатом и квадратичном воздействиях. Также определили качественные показатели системы в переходном режиме (быстродействиие, перерегулирование). Полученная установившаяся ошибка очень точно совпадает с динамической ошибкой пункта 4, подтверждая этим правильность расчетов.
Оценка качества переходного процесса показала, что переходной процесс имеет хорошие показатели качества (т.е. малую колебательность, небольшое перерегулирование и малое время переходного процесса).
СПИСОК ИСПОЛЬЗУЕМОЙ ЛИТЕРАТУРЫ
1. Бондаренко В.Н. Радиоавтоматика: Методические указания по курсовому проектированию для студентов специальности 2301 – «Радиотехника». Красноярск. КрПИ, 1992г.
2. Бондаренко В.Н. Теория управления и радиоавтоматика: Учебное пособие. Красноярск: КГТУ,1999г.
3. Казаринов Ю.М. Радиотехнические системы. М.: “Советское радио”, 1968г. -496 с.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.