УДК 658.382.3
ОПТИМАЛЬНОЕ ПЛАНИРОВАНИЕ МЕРОПРИЯТИЙ ПО ПОВЫШЕНИЮ БЕЗОПАСНОСТИ ПРОИЗВОДСТВЕННОЙ СРЕДЫ
Е.А.Бондарь
В условиях ограниченного финансирования мероприятий по охране труда важно выбрать из всего перечня мероприятий те, которые дадут максимальный социальный эффект и уложатся в выделенную сумму. Предлагается решение данной оптимизационной задачи методом динамического программирования.
безопасность производственной среды, интенсивность неблагоприятного воздействия производственной среды, математическая модель, опасный и вредный производственный фактор, оптимизация, условия труда
Повышение безопасности производственной среды (ПС) практически реализуется через различные мероприятия, направленные на совершенствование оборудования, технологий, средств защиты, доведение параметров ПС до нормативных значений.
Перечень таких мероприятий разрабатывается, в том числе, после проведения аттестации рабочих мест по условиям труда (УТ).
Каждое мероприятие имеет свою стоимость и характеризуется некоторым социальным эффектом. Под социальным эффектом мероприятия будем понимать снижение интенсивности неблагоприятного воздействия производственной среды, достигнутое благодаря реализации данного мероприятия.
В идеальном случае средства, необходимые для выполнения всего комплекса мероприятий выделяются полностью, и тогда оптимизация заключается в выстраивании правильной последовательности внедрения этих мероприятий.
Реальная ситуация такова, что финансовые средства на мероприятия по охране труда (ОТ) выделяются в недостаточном объеме. Тогда на первый план выходит задача выбора из всего перечня мероприятий тех, которые дадут максимальный социальный эффект и уложатся в выделенную сумму.
Общая постановка задачи оптимального планирования повышения безопасности ПС такова: при заданном объеме выделенных средств включить в план те мероприятия по ОТ, которые дадут максимальный социальный эффект.
Математическая формулировка этой задачи предложена В.М. Минько [1]. В качестве критерия оптимизации используется величина J – интенсивность неблагоприятного воздействия (НВ) опасных и вредных производственных факторов (ОВПФ), чел.балл. Эта величина для предприятия в целом определяется как
 (1)
(1)
где Nij – число работников j-участка, на которых действует i-ОВПФ; xij – балльная оценка этого фактора; m – число участков на предприятии; n – число ОВПФ, действующих на работника.
Балл xij непосредственно связан с оценкой УТ. При существующей классификации УТ xij принимает целочисленные значения из интервала от 1 до 7, при этом балл, равный 1, соответствует оптимальным условиям труда, балл, равный 7, – опасным условиям труда.
Очевидно, что, вкладывая некоторые средства в мероприятия по ОТ, можно влиять на балльные оценки. То есть в общем случае балльная оценка фактора есть функция от величины вложенных денежных средств.
![]() .
(2)
.
(2)
Математическая модель, описывающая снижение интенсивности неблагоприятного воздействия за счет внедрения мероприятий по охране труда, записывается следующим образом:
где 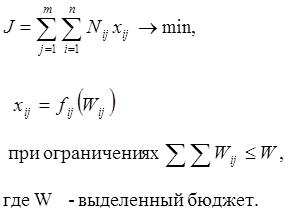 (3)
(3)
Дальнейшее решение задачи будет зависеть от вида функций fij.
При допущении, что функции fij линейны, данная оптимизационная задача достаточно легко решается методами линейного программирования.
Фактический
вид зависимостей ![]() определить достаточно сложно.
Ясно, что зависимости являются убывающими функциями (т.е. с увеличением
вложений балльная оценка производственного фактора будет снижаться), но очевидно,
что никто не может гарантировать линейность этих зависимостей.
определить достаточно сложно.
Ясно, что зависимости являются убывающими функциями (т.е. с увеличением
вложений балльная оценка производственного фактора будет снижаться), но очевидно,
что никто не может гарантировать линейность этих зависимостей.
Предположив нелинейность зависимостей балльной оценки факторов от вкладываемых средств, мы получаем задачу нелинейного программирования. Для задач нелинейного программирования не существует общих методов решения.
Из сложившейся ситуации возможны следующие выходы:
1. Упростить задачу, предположив линейность всех fij, получить задачу линейного программирования и решать ее, используя методы линейного программирования.
2. Решать задачу нелинейного программирования для каждого конкретного случая (по данным каждой конкретной аттестации рабочих мест по УТ).
3. Использовать метод динамического программирования.
Остановимся подробнее на последнем варианте.
Динамическое программирование (иначе динамическое планирование) есть особый метод оптимизации решений, специально приспособленный к так называемым многошаговым или многоэтапным задачам.
Задачу планирования повышения безопасности производственной среды можно отнести к многошаговым задачам. Этапом, или шагом, в такой задаче будет внедрение мероприятий в отдельном подразделении предприятия. Количество этапов при решении задачи будет равно числу подразделений предприятия, в которых планируются мероприятия по улучшению УТ.
Любую многошаговую задачу можно решать по-разному: либо искать сразу все элементы решения на всех m-шагах, либо строить оптимальное управление шаг за шагом, на каждом этапе расчета оптимизируя только один шаг. Обычно второй способ является проще первого, особенно при большом числе шагов. Такая идея постепенной пошаговой оптимизации лежит в основе метода динамического программирования. Оптимизация одного шага, как правило, проще оптимизации всего процесса.
С первого взгляда идея может показаться довольно тривиальной. Казалось бы, чего проще: если трудно оптимизировать процесс в целом, разобьем его на ряд шагов и оптимизируем каждый шаг в отдельности. Предложим на каждом участке предприятия такое использование средств, при котором социальный эффект от их внедрения будет максимальным.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.