




При скоростной селекции сигнала на фоне пассивных помех, когда спектры полезного и мешающего сигналов перекрываются, доплеровская частота Fq принимает энергетический характер: формирование провала по частоте на помеховый сигнал искажает частотную характеристику дискриминатора, подобно тому, как искажается Х.Н. углового дискриминатора при адаптации к активным помехам. Это ведет к ошибкам измерения Fq в тех случаях, когда учитывается энергетический характер Fq.
Вопрос 1. Постановка задачи. Модели помех.
Выше было определено, что обработку сигналов будем считать разделяющейся на пространственную и временную. Пространственная обработка, в ходе которой осуществляется компенсация активных помех и когерентное накопление полезного сигнала по элементам решетки, сводилась к оценке ОКМП или весового вектора с последующей весовой когерентной обработкой вектора входных воздействий. Последующая за пространственной временная обработка должна предусматривать либо согласованную фильтровую обработку, если устройство не предусматривает компенсацию пассивных помех, либо оптимальную когерентно-весовую обработку в случае наличия пассивных помех.
С целью выяснения особенностей измерения Fq на фоне пассивных помех модели сигнала и помех представлена виде пачки взаимно когерентных импульсов.
Для ожидаемого полезного сигнала
 (3.62)
(3.62)
где: Xi - независящий от времени коэффициент, характеризующий огибающую пачки эхо-сигналов, Xo(t-ti)
Xo - комплексная амплитуда i - го ожидаемого сигнала (i=1...М - номер периода зондирования).
Для пассивной помехи
 (3.63)
(3.63)
где Ai - коэффициент, характеризующий огибающую пачки пассивной помехи.
Исходя из уравнения корреляционного интеграла, который описывает этап временной обработки
 , (3.64)
, (3.64)
то весовой интеграл, характеризующий многоканальную временную обработку с учетом (3.64) примет вид:
 (3.65)
(3.65)
Либо, в многомерном варианте
![]() (3.66)
(3.66)
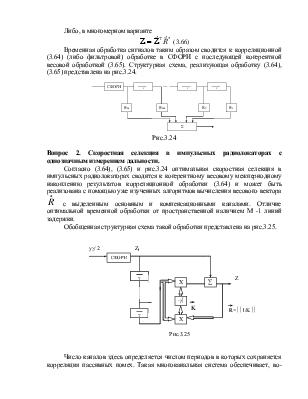
Временная обработка сигналов таким образом сводится к корреляционной (3.64) (либо фильтровой) обработке в СФОРИ с последующей когерентной весовой обработкой (3.65). Структурная схема, реализующая обработку (3.64), (3.65) представлена на рис.3.24.
Рис.3.24
Вопрос 2. Скоростная селекция в импульсных радиолокаторах с однозначным измерением дальности.
Согласно
(3.64), (3.65) и рис.3.24 оптимальная скоростная селекция в импульсных
радиолокаторах сводится к когерентному весовому межпериодному накоплению
результатов корреляционной обработки (3.64) и может быть реализована с помощью
уже изученных алгоритмов вычисления весового вектора ![]() с
выделенным основным и компенсационными каналами. Отличие оптимальной временной
обработки от пространственной наличием М -1 линий задержки.
с
выделенным основным и компенсационными каналами. Отличие оптимальной временной
обработки от пространственной наличием М -1 линий задержки.
Обобщенная структурная схема такой обработки представлена на рис.3.25.
 |
Вопрос 3. Особенности адаптивного следящего и неследящего и неследящего измерения параметров сигналов на фоне помех с временной корреляцией.
Следящее
измерение, как и в случае углового измерения, сведем к синтезу частотного
дискриминатора как основного элемента следящего измерителя. Синтез же
частотного дискриминатора сводится к использованию выведенного выше алгоритмов
(3.58), (3.59) с заменой углового параметра ![]() и
и
![]() u на Fq и Fqu:
u на Fq и Fqu:
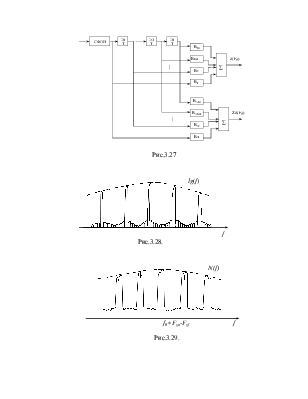
Устройства, реализующие алгоритм (3.67), (3.68) и когерентную весовую обработку представлены соответственно на рис. 3.26 и рис. 3.27.
Рис.3.26
Рис.3.27
![]()
 |
На рис. 3.28... рис. 3.32 представлены результаты статистического моделирования на рис. 3.28, 3.29 представлены спектры сигнала и пассивных помех соответственно. На рис.3.30 а, б, в представлены основные лепестки спектра сигнала и помехи с различной степенью их перекрытия по оси частот.
 |
 |
1. В реальных условиях приема РЛ сигналов на фоне помех характерной является неопределенность как сигнала так и помех.
2. Задача
снятия априорной неопределенности сигнала относительно параметров обстановки  может решаться двумя способами:
может решаться двумя способами:
а) с помощью неадаптивных алгоритмов, в конечном счете оказывающимися инвариантными к параметру l. Такие алгоритмы по показателям качества измерения (систематическая и флюктуационная ошибки) соответствует однократной оценке параметра l;
б) с помощью
адаптивных алгоритмов, в которых используется не однократная, а сглаженная
оценка параметра ![]() . Такой алгоритм
оказывается адаптивным как на
. Такой алгоритм
оказывается адаптивным как на ![]() , так и по a.
, так и по a.
По мере адаптации адаптивные алгоритмы по своим показателям качества приближаются к потенциально достижимым (к точности алгоритмов, с известными параметрами l).
3. Преодоление
априорной неопределенности информативного параметра ![]() относительно
параметров внешних активных помех
относительно
параметров внешних активных помех  требует
вычисления корреляционной матрицы помех Фп с последующим ее
обращением, либо вычисления собственно ОКМП и формированием весового вектора
требует
вычисления корреляционной матрицы помех Фп с последующим ее
обращением, либо вычисления собственно ОКМП и формированием весового вектора  .
.
Как те, так и другие варианты требуют емких операций векторно-матричного перемножения, однако вычисление ОКМП оказывается значительно более простым при сохранении всех характеристик процесса адаптации.
4. Задача преодоления априорной неопределенности относительно энергии ожидаемого сигнала Эо при изменении пространственных координат, нешумящей цели на фоне остатков компенсации, коррелированных по пространству, возникает вследствие того, что угловые координаты нешумящей цели в этом случае становятся существенно энергетическими, что приводит к необходимости учета всех ее составляющих в достаточной статистике.
5. При скоростной селекции сигнала на фоне пассивных помех, когда спектры полезного и мешающего сигналов перекрываются; доплеровская частота Fq принимает энергетический характер. Это ведет к ошибкам измерения в тех случаях, когда не учитывается характер Fq.
6. Синтез следящих и неследящих измерителей проводится на основе адаптивных и неадаптивных алгоритмов на фоне помех с пространственно-временной корреляцией с помощью решающего правила:
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.