1.1. Круговой обзор по одной угловой координате.
Для лучшего наблюдения сигналов, отраженных целями, на
фоне шума поочередно концентрируют энергию зондирующих сигналов в различных
направлениях, совершая последовательный обзор пространства. Простейшим способом
обзора является круговой. Его реализуют (рис. 1, а), вращая остронаправленную
по одной угловой координате антенну со скоростью ![]() оборотов/минуту
или
оборотов/минуту
или ![]() угловых градусов в секунду. При
ширине характеристики направленности на заданном уровне
угловых градусов в секунду. При
ширине характеристики направленности на заданном уровне ![]() угловых
градусов каждое направление облучают за время
угловых
градусов каждое направление облучают за время ![]() .
Поделив время облучения на период следования импульсов
.
Поделив время облучения на период следования импульсов ![]() ,
оценим число излучаемых в каждом направлении импульсов. Если, например,
,
оценим число излучаемых в каждом направлении импульсов. Если, например, ![]() об/мин, а = 18 то iобл = 1,8/36 = 50
мс. для Гшах = 450 км и ГЛЮ’ = 450/150 = З мс в каждом таком на правлении число
зондирующих импульсов М 50/З 16.
об/мин, а = 18 то iобл = 1,8/36 = 50
мс. для Гшах = 450 км и ГЛЮ’ = 450/150 = З мс в каждом таком на правлении число
зондирующих импульсов М 50/З 16.
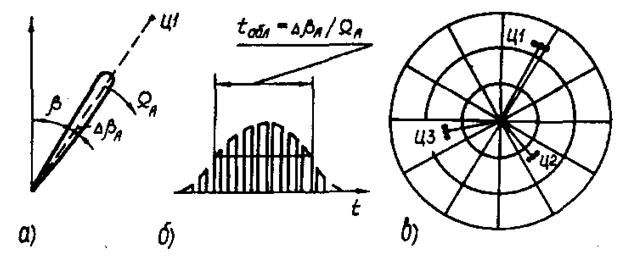
Рис.1.
Чтобы провести аналогичный расчет в режиме передачи—приема, вводят ширину эквивалентной характеристики направленности Л” на передачу—прием. Пусть на прием используют ту же характеристику направленности, что и на передачу. Эквивалентная характеристика направленности на прием—передачу практически примерно в 1,5 раза уже, чем только на передачу. Число принимаемых импульсов М 12. Совокупности принимаемых при обзоре радио- или видеоимпульсов (рис. 75, б) называют пачками этих импульсов.
Круговой обзор используют для наблюдения воздушного пространства, суши и моря, а также поверхности Земли с летательных аппаратов.
Индикаторы кругового обзора (ИКО). Обеспечивают наблюдение яркостных отметок целей на экранах электронно-лучевых трубок с послесвечением. На управляющий электрод трубки подается продетектированное напряжение приемника. Оно изменяет яркость следа электронного луча — светящегося пятна на экране трубки. Электронный луч подвергают развертыванию — радиальному и азимутальному. Радиальное развертывание проводят от центра к периферии трубки в направлении азимутального положения характеристики направленности антенны (рис. 7 а). Азимутальное развертывание сводится к изменению направления радиального развертывания. На экране высвечиваются следы импульсов пачки (рис. 7.5, 6), образуемой в процессе перемещения характеристики направленности, сливающиеся в светящуюся дужку (рис. 7.5, в). Радиус дужки определяется дальностью, ее центр — азимутом цели. Совокупность дужек отображает поток целей.
Для упрощения отсчетов координат на экране индикатора формируют кольцевые и радиальные метки электрического масштаба. Подаваемая на индикатор информация может преобразовываться в цифровую форму.
Автоматическое сопровождение в процессе кругового обзора. Про водится по дальности и угловым координатам. Сопровождение по дальности несущественно отличается от рассмотренного в разд. 7.2.1 только расширением стробов сопровождения за счет перерывов наблюдения в процессе обзора. Каждый из простробированных видеоимпульсов пачки растягивают при этом на период Т с сохранением его амплитуды. Сопровождение по временному положению сплошного видеоимпульса, образованного из пачки, — это и есть сопровождение отстробированной цели по азимуту. Автоматическое сопровождение часто заменяют полуавтоматическим.
Полуавтоматическое сопровождение в процессе кругового обзора. Отличается тем, что выводимые на экран индикатора стробы сопровождения вручную подправляются оператором таким образом, чтобы от метка от сопровождаемой цели находилась в центре строба. Используется при невысокой точности прогноза данных о цели (низкий темп обзора, наличие помех и т.д.).
7.3.2. Секторный обзор по одной угловой координате.
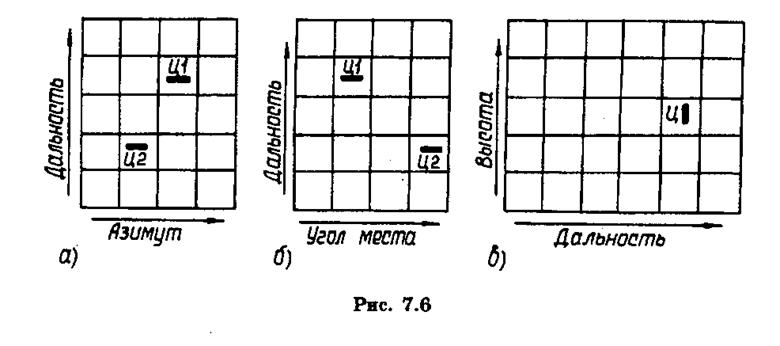
Иначе, секторное развертывание (сканирование) луча антенны. Может быть механическим и электрическим, см. разд. 7.3.5 и 7.3.6. Механическое развертывание осуществляют, перемещая облучатель зеркальной антенны без перемещения ее в целом. для визуального наблюдения используют индикацию с яркостной отметкой на индикаторах секторного обзора; с развертыванием изображения в прямоугольных координатах дальность — азимут, азимут — дальность (рис. 7.6, а), угол места—дальность (рис. 7.6, 6), высота — дальность или дальность — высота.
На индикаторах .угол места—дальность. линии постоянных высот Н = г вiп е соответствуют при € « 1 гиперболам г Н = сопв На индикаторах .дальность—высота. гиперболы пересчитываются в горизонтальные прямые Н = сопв (рис. 7.6, в). Наряду с визуальным наблюдением используют полуавтоматическое и автоматическое сопровождение пачек импульсов по дальности и угловой координате.
7.3.3. Коническое развертывание.
Широко использовалось в начале развития радиолокации, когда ограничивались преимущественно одноканальным одноцелевым приемом. Обеспечивалось точное измерение двух угловых координат одной цели и автоматическое ее сопровождение. Импульсная генерация колебаний передатчика для этого сочеталась с коническим развертыванием двумерной характеристики направленности антенны. В простейших средствах сопровождения и теленаведения (разд. 5.6) метод конического развертывания применяют по настоящее время.
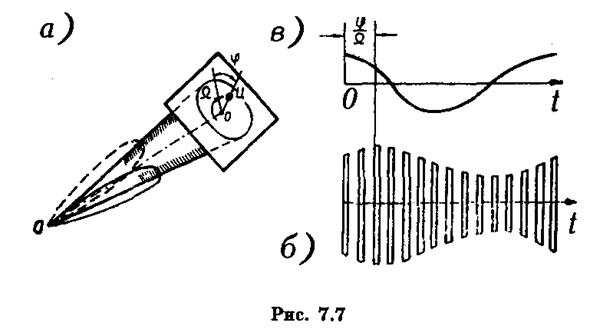
Для реализации развертывания облучатель параболической антенны выносят из фокуса параболоида, за счет вращения облучателя ось характеристики направленности вращают по конической поверхности (рис. 7.7, а). Ось же конической поверхности определяет при этом равносигнальное направление. Если цель наблюдается в указанном направлении, амплитуды отраженных радиоимпульсов в процессе вращения не модулируются. Модуляция не наблюдается также вблизи равносигнального направления в пределах некоторой равносигнальной зоны. Смещение цели ОЦ (рис. 7.7, 6) за пределы равносигнальной зоны приводит к амплитудной модуляции импульсов колебаниями частоты развертывания О с глубиной, пропорциональной смещению Оц.
Временной сдвиг о/ между модулирующим и опорным напряжениями той же частоты (рис. 7.7, в) характеризует угловое смещение цели в картинкой плоскости (рис. 7.7, а). Опорное напряжение вырабатывается измерительным электрическим генератором, ротор которого механически связан с облучателем. Фаза опорного напряжения привязывается поэтому к текущему положению облучателя. Получаемая информация позволяет автосопровождать цель по углам и дальности.
7.3.4. Обзор по двум угловым координатам на основе зеркальных и вибраторных антенн.
Достигается с меньшей затратой аппаратуры в одноцелевых и малоцелевых РЛС и с большей ее затратой в многоцелевых РЛС.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.