Для получения одного и того же критического скольжения sK=2...4, необходимого для устранения самохода и получения достаточно линейных механических и регулировочных характеристик, у двигателя с обычным короткозамкнутым ротором приходится значительно повышать активное сопротивление обмотки ротора. Таким образом, электрические потери в роторе при одном и том же токе у двигателя с обычным короткозамкнутым ротором примерно в два раза больше, чем у двигателя с полым немагнитным ротором. В целом, однако, потери двигателя с обычным ротором за счет малой силы намагничивающего тока все же меньше, чем у двигателя с полым ротором, поэтому его КПД несколько выше.
Двигатели сквозной конструкции применяются вособо ответственных схемах приборной автоматики. Они имеют лучшие характеристики, но зато и более высокую стоимость.
|
|
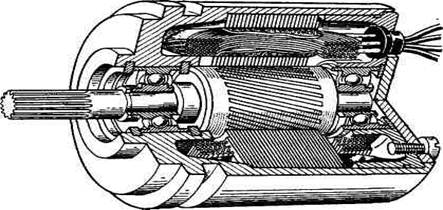
Рис.8 - Асинхронный исполнительный двигатель сквозной конструкции.
Особенностью их конструкции является то, что диаметр расточки под
подшипники (в подшипниковых щитах) у них равен внутреннему диаметру статора (Dn=Ds). Это
позволяет производить окончательную обработку (шлифовку) внутренней
поверхности статора и отверстий под подшипники после сборки (установки
подшипниковых щитов) одновременно. В целях предохранения лобовых частей обмотки
от металлической стружки она покрывается специальным компаундом. Такая
конструкция двигателя позволяет уменьшить величину воздушного зазора между
статором и ротором до 0,03...0,05 мм, что способствует снижению
намагничивающего тока, потерь в обмотке статора, а следовательно, повышению cos φ, КПД и коэффициента
использования двигателя.
С целью уменьшения активного сопротивления ротора, необходимого для получения нужного sK, у этих двигателей обычно делаются открытые (прямоугольные) пазы на роторе, обеспечивающие уменьшение индуктивного сопротивления рассеяния его обмотки. Ротор для уменьшения момента инерции обычно изготовляется малого диаметра. Необходимая мощность обеспечивается за счет увеличения длины. Обычно LR/DR—2 ... 3.
Увеличение за счет уменьшения воздушного зазора вращающего момента Мк, развиваемого двигателем, и уменьшение за счет DR момента инерции ротора JR позволяют значительно снизить электромеханическую постоянную времени двигателя Tm ~Jr/Mk. В определенном диапазоне номинальных мощностей Тм у двигателя сквозной конструкции даже меньше, чем у двигателей с полым немагнитным ротором.
К положительным свойствам двигателей «сквозной» конструкции следует отнести: 1) более высокие соsφ, КПД, лучшее использование двигателя; 2) меньшие массу и габариты в определенных диапазонах номинальных мощностей.
Недостатками двигателей с обычным короткозамкнутым ротором являются: 1) сравнительно большой момент инерции ротора, что в целом ряде двигателей ведет к увеличению электромеханической постоянной времени; 2) сравнительно большая величина сигнала трогания, что обусловлено массой ротора, наличием действующих на ротор радиальных сил одностороннего магнитного притяжения к статору, вследствие того что ротор ферромагнитный; 3) наличие высших зубцовых гармоник поля вследствие зубчатого строения и часто открытых пазов ротора.
Статоры таких двигателей ничем не отличаются от статоров обычных двухфазных асинхронных машин. Роторы изготовляются в виде полых ферромагнитных цилиндров с толщиной стенок от 0,3 до 3 мм. Так как ротор ферромагнитный, то магнитный поток замыкается непосредственно по ротору. Таким образом, в отличие от двигателя с полым немагнитным ротором здесь нет необходимости во внутреннем статоре. Воздушный зазор между ротором и статором в этих двигателях небольшой (0,2... 0,3 мм), поэтому намагничивающая сила воздушного зазора невелика. В этом отношении этот двигатель выгодно отличается от двигателя с полым немагнитным ротором. Однако суммарная магнитодвижущая сила, а следовательно, и намагничивающий ток (Iμ) двигателя практически не отличаются от МДС и Iμдвигателя с полым немагнитным ротором. Причиной этого является то, что магнитная проводимость полого ферромагнитного ротора вследствие его малой толщины весьма незначительна.
Как результат большого намагничивающего тока, коэффициент мощности двигателя с полым ферромагнитным ротором практически такой же, как у двигателя с полым немагнитным ротором (cos φ=0,3... 0,5), причем значение его уменьшается при увеличении частоты питающей сети.
Активное сопротивление полого ферромагнитного ротора весьма значительно. Это объясняется, во-первых, тем, что ферромагнитные материалы, из которых изготовляется ротор, обладают значительно большим удельным сопротивлением, чем медь и алюминий, а во-вторых, тем, что при работе машины вследствие эффекта вытеснения ток ротора протекает лишь по небольшому поверхностному слою, толщина которого зависит от материала и частоты токов ротора. Вследствие большого активного сопротивления ротора критическое скольжение двигателей с полым ферромагнитным ротором значительно больше единицы, поэтому эти двигатели не имеют самохода и устойчиво работают во всем диапазоне скоростей — от нуля до синхронной. По этой же причине механические и регулировочные характеристики двигателей с полым ферромагнитным ротором весьма близки к линейным. Они более линейны, чем характеристики двигателей с полым немагнитным и обычным короткозамкнутым роторами. Линейность характеристик двигателя увеличивается с увеличением частоты питающей сети.
У некоторых двигателей вследствие большого активного сопротивления ротора уменьшается КПД. В этом случае с целью уменьшения активного сопротивления роторов производят их омеднение — цилиндрическую поверхность ротора гальваническим путем покрывают слоем меди толщиной 0,05... 0,1 мм. Омеднение ротора способствует уменьшению активного его сопротивления, а следовательно, увеличению момента и мощности на валу двигателя, причем омеднение цилиндрической поверхности менее эффективно, так как одновременно с увеличением момента и мощности на валу двигателя оно способствует увеличению потерь в роторе от высших— зубцовых — гармоник поля и потерь в обмотке статора от возрастающего, вследствие увеличения немагнитного промежутка; намагничивающего тока. Омеднение торцовых поверхностей ротора более эффективно. Оно способствует увеличению не только момента и мощности на валу двигателя, но и его КПД.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.