 Величина, показывающая отношение ускорения
регулируемой координаты к ошибке в установившемся режиме, называется добротностью
САР по ускорению, которая численно равна коэффициенту усиления
Величина, показывающая отношение ускорения
регулируемой координаты к ошибке в установившемся режиме, называется добротностью
САР по ускорению, которая численно равна коэффициенту усиления ![]() разомкнутой САР:
разомкнутой САР:
![]() .
.
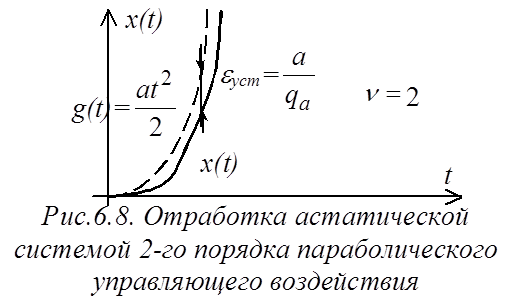
Термин добротность системы по скорости применяется к астатическим системам 1-го порядка, а термин добротность системы по ускорению – к астатическим системам второго порядка.
В обоих случаях, чем выше добротность q,
тем меньше установившаяся ошибка ![]() , и тем точнее
отработка системой управляющего воздействия.
, и тем точнее
отработка системой управляющего воздействия.
Системы стабилизации
Выше уже отмечалось, что для систем стабилизации, помимо астатизма по управлению (как и в системах точного воспроизведения), важным является решение вопроса астатизма САР по возмущающему воздействию. Если возмущающее воздействие влияет на регулируемую координату в установившемся режиме, САР считается статической по возмущению, в противном случае – астатической.
Структурная схема системы стабилизации представлена на рис.6.9.
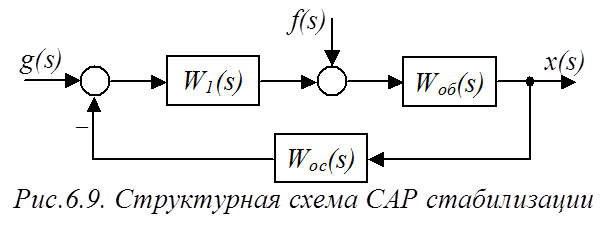 Для определения влияния возмущения необходимо сначала
найти ПФ САР от возмущения к выходу. Приравниваем g(s)=0 и, считая цепь со звеньями
Для определения влияния возмущения необходимо сначала
найти ПФ САР от возмущения к выходу. Приравниваем g(s)=0 и, считая цепь со звеньями ![]() и
и
![]() отрицательной ОС по отношению к
возмущению, находим:
отрицательной ОС по отношению к
возмущению, находим:
 ,
,
где
![]() – ПФ цепи ОС по отношению к возмущающему
воздействию.
– ПФ цепи ОС по отношению к возмущающему
воздействию.
Представим ПФ в знаменателе последнего выражения в виде:
 ,
,
где
![]() – порядок астатизма ПФ ОУ;
– порядок астатизма ПФ ОУ;
![]() – порядок астатизма ПФ цепи
ОС по отношению к возмущающему воздействию;
– порядок астатизма ПФ цепи
ОС по отношению к возмущающему воздействию;
![]() ,
, ![]() –
соответствующие нормированные ПФ.
–
соответствующие нормированные ПФ.
Тогда искомая ПФ
 .
.
Для исключения влияния возмущения на регулируемую
координату (то есть, для обеспечения астатизма САР по возмущению) необходимо,
чтобы ![]() . Из последнего выражения следует,
что для этого необходимо, чтобы
. Из последнего выражения следует,
что для этого необходимо, чтобы ![]() .
.
Астатизм САР по возмущающему воздействию определяется порядком астатизма цепи ОС по отношению к возмущению и не зависит от порядка астатизма ОУ. Другими словами, если чистые интеграторы отсутствуют в цепи ОС, то система будет статической, независимо от того, есть ли интеграторы в ОУ или нет.
Пример 1. Определить, является ли система (рис.6.10) астатической по управляющему и возмущающему воздействиям?
Решение. Находим ПФ разомкнутой САР:
![]() .
.
Таким
образом, ![]() , следовательно, по отношению к
управляющему воздействию система астатическая 1-го порядка.
, следовательно, по отношению к
управляющему воздействию система астатическая 1-го порядка.
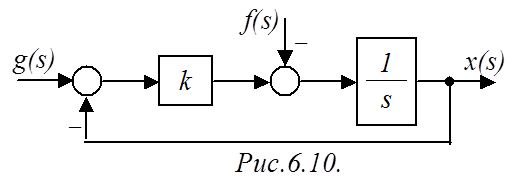 Находим ПФ цепи отрицательной ОС по отношению к
возмущению:
Находим ПФ цепи отрицательной ОС по отношению к
возмущению:
![]() .
.
Таким
образом, ![]() , следовательно, система является
статической по отношению к возмущающему воздействию.
, следовательно, система является
статической по отношению к возмущающему воздействию.
Пример 2. Определить, является ли система (рис.6.11) астатической по управляющему и возмущающему воздействиям?
Решение. Находим ПФ разомкнутой САР:
![]() .
.
Таким
образом, ![]() , следовательно, по отношению к
управляющему воздействию система астатическая 1-го порядка.
, следовательно, по отношению к
управляющему воздействию система астатическая 1-го порядка.
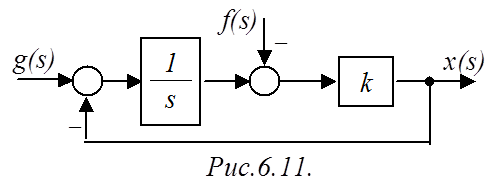 Находим ПФ цепи отрицательной ОС по отношению к
возмущению:
Находим ПФ цепи отрицательной ОС по отношению к
возмущению:
![]() .
.
Таким
образом, ![]() , следовательно, и по отношению к
возмущающему воздействию система является астатической 1-го порядка.
, следовательно, и по отношению к
возмущающему воздействию система является астатической 1-го порядка.
Уравнения и передаточные функции системы
"силовой преобразователь – двигатель"
Принципиальная схема система "преобразователь – двигатель" представлена на рис.6.12а.
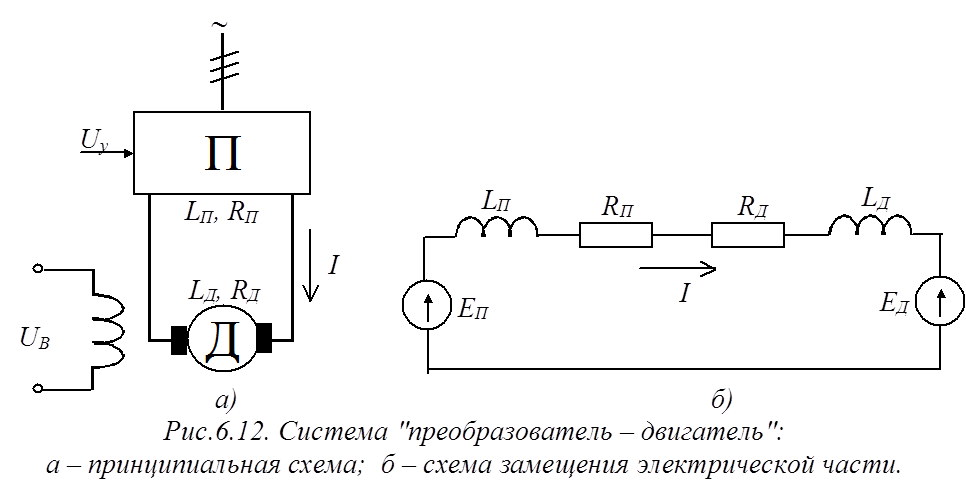
Тиристорный преобразователь П предназначен для выпрямления сетевого трехфазного напряжения, на его выходе имеем выпрямленное ЭДС преобразователя EП, величина которого зависит от значения напряжения управления Uy. Электромагнитные свойства преобразователя характеризуются активным сопротивлением RП и индуктивностью LП.
ЭДС, наводимая в обмотке якоря двигателя EД направлена встречно с ЭДС преобразователя EП и пропорциональна частоте вращения вала двигателя. Индуктивность и активное сопротивление цепи якоря двигателя Д
![]() ;
; ![]() ,
,
где
![]() ,
, ![]() –
параметры цепи собственно якоря двигателя;
–
параметры цепи собственно якоря двигателя; ![]() ,
, ![]() – параметры обмотки добавочных
полюсов;
– параметры обмотки добавочных
полюсов; ![]() ,
, ![]() –
параметры компенсационной обмотке.
–
параметры компенсационной обмотке.
Электрическая схема замещения электрической части системы "преобразователь – двигатель" представлена на рис.6.12б.
Обозначив
![]() ;
; ![]() ,
,
дифференциальное уравнение электрического равновесия цепи якоря запишем в следующем виде:
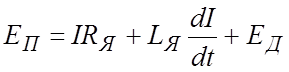 .
.
Соответствующее уравнение в изображениях Лапласа:
 .
.
Обозначим ![]() –
электромагнитная постоянная времени силовой цепи якоря двигателя, с. Тогда
последнее уравнение запишется в виде:
–
электромагнитная постоянная времени силовой цепи якоря двигателя, с. Тогда
последнее уравнение запишется в виде:
![]() ,
,
откуда
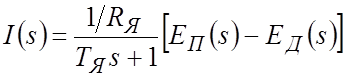 . (1)
. (1)
ЭДС двигателя пропорциональна частоте вращения вала:
![]() ,
,
или, переходя к изображениям Лапласа,
![]() , (2)
, (2)
где
![]() – конструктивная постоянная,
пропорциональная номинальному магнитному потоку двигателя.
– конструктивная постоянная,
пропорциональная номинальному магнитному потоку двигателя.
Наконец, уравнение механического равновесия
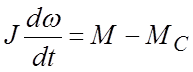 ,
,
где M – электромагнитный момент, развиваемый двигателем; MC – момент статического сопротивления (нагрузки); J – суммарный момент инерции вала двигателя.
Уравнение электромагнитного момента имеет вид:
![]() ,
,
и формально статический момент может быть представлен в аналогичном виде:
![]() ,
,
где
![]() – ток статической нагрузки.
– ток статической нагрузки.
С учетом этого уравнение механического равновесия может быть представлено в виде:
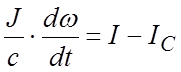 .
.
Переходя к изображениям Лапласа:
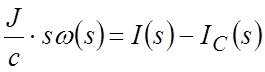 ,
,
после преобразований получим:
 .
.
Вводя понятие электромеханической постоянной
времени  , последнее уравнение представим в
окончательном виде:
, последнее уравнение представим в
окончательном виде:
 . (3)
. (3)
Уравнениям (1) – (3) соответствует структурная схема, представленная на рис.6.13.
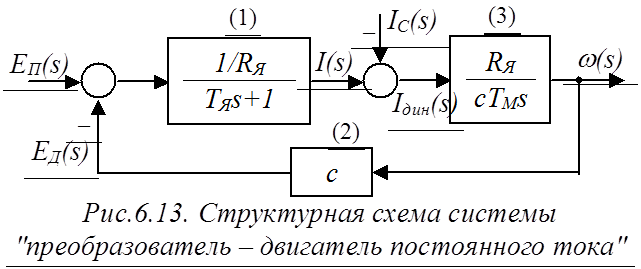
Анализируя структурную схему (рис.6.13), можно увидеть, что данная система астатическая по отношению к управляющему воздействию EП(s) (поскольку присутствует чистый интегратор в блоке (3)), и в то же время статическая по отношению к возмущающему воздействию IC(s) (в блоках (1) и (2) отсутствуют интеграторы). Таким образом, при изменении нагрузки IC на валу двигателя будет изменяться и скорость w(s).
ПФ по управляющему воздействию:
 .
.
В установившемся режиме
 , и
, и ![]() .
.
ПФ по возмущающему воздействию:
 .
.
Установившаяся ошибка:
 .
.
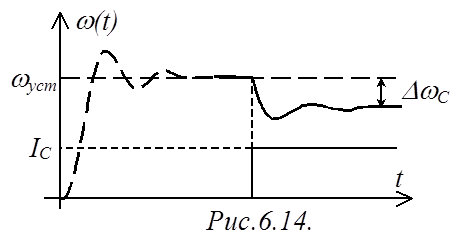 Т.е., при подаче какого-то управляющего воздействия
(рис.6.14) двигатель каким-то образом (показано пунктирной линией) разгонится
до скорости
Т.е., при подаче какого-то управляющего воздействия
(рис.6.14) двигатель каким-то образом (показано пунктирной линией) разгонится
до скорости ![]() . После скачкообразного приложения
возмущающего воздействия (наброса нагрузки) будет иметь место ошибка
регулирования, которая после затухания переходного процесса будет равна
. После скачкообразного приложения
возмущающего воздействия (наброса нагрузки) будет иметь место ошибка
регулирования, которая после затухания переходного процесса будет равна ![]() .
.
Сравнивая ПФ ![]() и
и
![]() , видим, что знаменатели, т.е.,
характеристические полиномы двигателя, остаются одинаковыми вне зависимости от
того, что является входом, и что – выходом.
, видим, что знаменатели, т.е.,
характеристические полиномы двигателя, остаются одинаковыми вне зависимости от
того, что является входом, и что – выходом.
Этот вывод можно распространить на любую замкнутую
САР: характеристический полином ![]() не зависит от
того, на основании какой ПФ он записан.
не зависит от
того, на основании какой ПФ он записан.
Для определения характера переходного процесса при
подаче управляющего воздействия рассмотрим детальней ПФ ![]() :
:
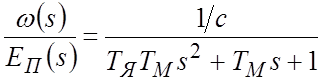 .
.
Таким
образом, если ![]() , будем иметь колебательное
звено, если же
, будем иметь колебательное
звено, если же ![]() , то данная ПФ является ПФ
двух последовательно соединенных апериодических звеньев.
, то данная ПФ является ПФ
двух последовательно соединенных апериодических звеньев.
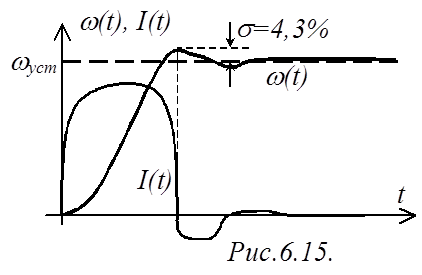 Например, при
Например, при ![]() и
и
![]() переходный процесс по току и
скорости качественно будет иметь вид, показанный на рис.6.15. Отметим, что
точки экстремума кривой w(t) совпадают по времени с нулевыми значениями I(t), поскольку ток, согласно (3), является производной от
скорости.
переходный процесс по току и
скорости качественно будет иметь вид, показанный на рис.6.15. Отметим, что
точки экстремума кривой w(t) совпадают по времени с нулевыми значениями I(t), поскольку ток, согласно (3), является производной от
скорости.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.