 (16)
(16)
2.4. Расчет основных размеров дросселя
Исходные данные:
1. Давление PНОМ = 16 МПа;
2. Перепад давлений на дросселирующей щели DP = 14 МПа;
3. Количество жидкости Q = 1580 см3 / с;
4. Скорость потока жидкости в подводящем канале u = 4 м / с;
Расчет ведем по [2].
Площадь проходного сечения дросселя
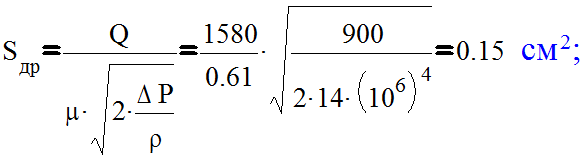 (17)
(17)
Условный проход подводящего канала
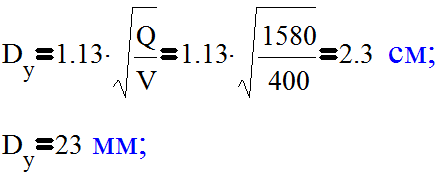 (18)
(18)
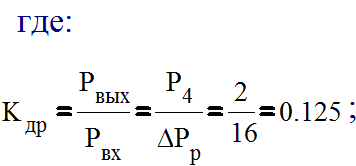
Давление на выходе из дросселя
![]() (19)
(19)
2.4.1. Определение передаточной функции дросселя
Дроссель имеет характеристику пропорционального звена, следовательно, передаточная функция будет иметь вид:
 ;
(20)
;
(20)
2.5. Расчет основных размеров гидоцилиндра
Исходные данные:
1 Давление PНОМ = 16 МПа;
2. Количество жидкости Q = 1580 см3 / с;
3. Диаметр поршня D = 40 мм = 4 см;
4. Диаметр штока d = 20 мм = 2 см;
5. Ход поршня L = 250 мм;
6. КПД h = 0.95;
Расчет ведем по [2].
Площадь поршневой полости
 (21)
(21)
Теоретическое усилие на штоке без учета сил трения и инерции:
 (22)
(22)
Фактическое усилие на штоке цилиндра
 (23)
(23)
Расчетная скорость штока без учета утечек рабочей жидкости
 (24)
(24)
Время разгона при прямом ходе
 (25)
(25)
Постоянный коэффициент гидроцилиндра
 (26)
(26)
2.5.1. Определение передаточной функции гидроцилиндра
Передаточная функция гидроцилиндра имеет вид:
 (27)
(27)
3. Построение структурной схемы неизменяемой части системы автоматического регулирования гидропривода станка
Следующим этапом является представление гидропривода в виде структурной схемы, состоящей из типовых динамических звеньев. Это вызвано тем, что устойчивость и качество регулирования приводов исследуют частотными методами и использованием передаточных функций.
К неизменяемой части системы автоматического регулирования отнесем типовые звенья, передаточная функция которых по отношению к основному сигналу не равняется единице. Следовательно, к неизменяемой части относятся все звенья системы: клапан, распределитель, дроссель и гидроцилиндр.
Структурная схема неизменяемой части системы изображена на рис.2.
4. Определение устойчивости системы
На основании полученной выше структурной схемы неизменяемой части гидропривода можно определить передаточную функцию разомкнутого привода путем перемножения передаточных функций составляющих элементов. Получим:
 (28)
(28)
Определим устойчивость системы по критерию Гурвица, который гласит: для того, чтобы система управления была устойчива необходимо и достаточно, чтобы все определители Гурвица имели один и тот же знак, совпадающий со знаком коэффициента а0.
Запишем характеристическое уравнение
![]() ; (29)
; (29)
![]() ;
;
Необходимое условие:
![]() ;
; ![]() ;
; ![]() ;
;
Достаточное условие:
 ;
;
Необходимое и достаточное условия выполняются, следовательно система устойчива.
5. Определение основных показателей качества
переходного процесса
Переходный процесс будем строить с помощью метода трапеций. Суть метода заключается в том, что непрерывная кривая U(w) заменяется участками ломаной линией. Тогда всю кривую можно записать суммой его составляющих. При этом каждому участку Ui (w) соответствует i-ая составляющая hi(t) переходного процесса. Тогда весь переходный процесс можно считать суммой его составляющих.
Выделим действительную часть передаточной функции U(w)
 (30)
(30)
Изобразим график U(w) на рис.3 с данными из табл.1.
Заменяя кривую U(w) на участки ломанной линии, получаем 2 трапеции. Форма трапеции характеризуется отношением:
 (31)
(31)
Из рис.3
определяем, что ![]() 1/с,
1/с, ![]() 1/с,
1/с, ![]() 1/с,
1/с, ![]() 1/с.
1/с.
Определяем c1, c2:
 (32)
(32)
Высота трапеции из рис.3 h1 = 2.6, h2 = 0.5.
Значения нормированной функции вычислены численными методами и заданы в виде табличной функции h(t) для различных c, которая приводится в [3].
Переход от нормированного времени t к текущему t происходит по формуле:
 (33)
(33)
Составляющую hi(t) вычисляют по вспомогательной функции h(t), пользуясь формулой:
 (34)
(34)
Для построения переходного процесса составляются табл. 2 и 3.
График переходного процесса представлен на рис.4.
Из рис.4 определим основные показатели качества переходного процесса:
Перерегулирование s, определяемое отношением максимального выброса Xmax - Xуст регулируемой величины к ее установившемуся значению Xуст в процентах:
 (35)
(35)
Время переходного процесса tр, характеризующее быстроту затухания колебаний. По графику tр = 0.72 с.
Число колебаний n, равное числу переходов через установившееся значение за время переходного процесса. n = 0
Вывод: таким образом получили, что система соответствует монотонному процессу.
Чем меньше перерегулирование, время регулирования и количество колебаний, тем выше качество привода. Следовательно рассматриваемый привод имеет высокое качество.
Требования предъявляемые к приводу по устойчивости и показателям качества выполняются, следовательно необходимость введения корректирующего устройства и построения ЖЛАЧХ не возникает.
6. Построение ЛАХ неизменяемой части системы автоматического регулирования гидропривода станка
6.1. Описание построения ЛАЧХ
(36)
Основными этапами построения ЛАЧХ неизменяемой части являются следующие:
1. Определяем частоты сопряжения
 (37)
(37)
2. До частоты сопряжения ![]() wН1
характеристика идет с наклоном 0 дБ/ дек.
wН1
характеристика идет с наклоном 0 дБ/ дек.
3. После частоты wН1 наклон характеристики становится -20дБ/дек, так как включается апериодическое звено.
4. После частоты wН2 наклон характеристики становится -40дБ/дек.
Для построения 20Lg |W(jw)| необходимо сложить полученные асимптоты.
![]() (38)
(38)
![]() (39)
(39)
ЛАЧХ представлена на рис. 3 на стр.
6.2. Анализ ЛАЧХ неизменяемой части
Для устойчивых систем справедливо утверждение: в области частоты среза (среднечастотная область) наклон ЛАЧХ должен быть -20дБ/дек. Из графика видно, что ЛАЧХ в области частоты среза имеет наклон -20дБ/дек, следовательно исходная система устойчива.
7. Построение и анализ ФЧХ
Строим ФЧХ для этого запишем f (w)
f (w) = -arctan (0.2w) - arctan (0.0026w) (40)
f (0) = 0°;
f (1) = - 11.9 - 0.1 = - 12 °;
f (10) = - 64.5 - 1.5 = - 66°;
f (100) = - 87.3 - 14.6 = - 101.9°;
f (1000) = - 89.7 - 69 = - 158.7°;
f (10000) = - 90 - 87.8 = - 177.8°.
Запас устойчивости по амплитуде m находят по ординате ЛАЧХ, соответствующей точке пересечения ЛФЧХ с прямой -180°. Из графика видно, что запас устойчивости по амплитуде достаточен.
Запас устойчивости по фазе j определяется превышением ЛФЧХ над прямой -180° при частоте среза. Из графика j = 106° видно, что запас устойчивости по фазе достаточен. Следовательно установка корректирующих звеньев не требуется.
СПИСОК ЛИТЕРАТУРЫ
1. Металлорежущие станки и автоматы: Учебник для машиностроительных ВТУЗов / под ред. А.С. Проникова - М.: Машиностроение, 1981г.
2. Металлорежущие станки: Учебное пособие для ВТУЗов / под ред. Н.С. Колев, Л.В. Красниченко, Н.С. Никулин и др. - 2-е изд., перераб. И доп. - М.: Машиностроение, 1980г.
3. Топчеев Ю.И. Атлас для поектирования систем автоматического регулирования М: Машиностроение, 1989г.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.