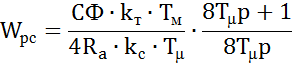
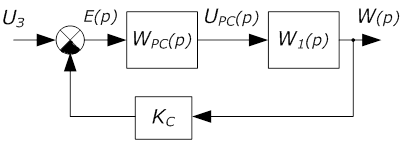
Т.о. структурная схема имеет вид:
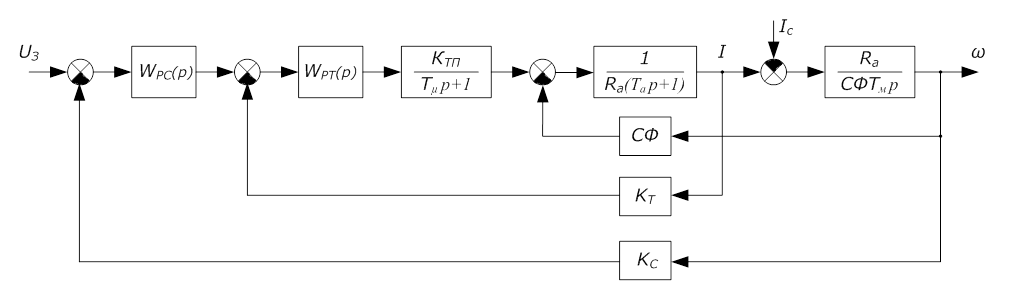
Рис. 5 Структурная схема САУ
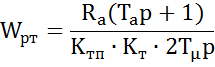
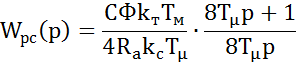
7.1. Синтез регулятора тока
Синтез регулятора тока происходит без внутренней ОС по противоЭДС электродвигателя.
Передаточная функция разомкнутой системы имеет вид:

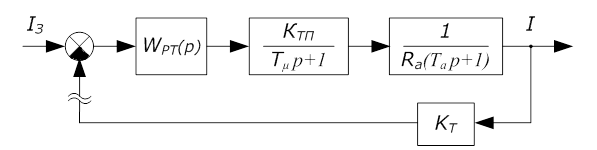
Рис. 6 Расчетная схема контура тока
Желаемая передаточная функция
разомкнутого контура тока имеет вид:
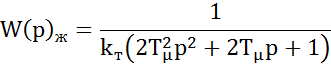
.
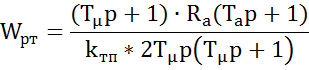
Приравнивая
![]() , выражаем передаточную функцию
регулятора тока:
, выражаем передаточную функцию
регулятора тока:

7.2. Синтез контура скорости
Расчет регулятора скорости ведем без учета нагрузки. Нагрузку будем учитывать при анализе системы
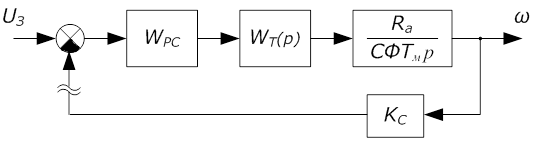
Рис. 7 Расчетная схема контура скорости
Желаемая разомкнутая функция регулятора скорости:

Реальная передаточная функция контура скорости:

![]()



В результате мы получили П – регулятор скорости. По заданию требуется обеспечить астатизм второго порядка по отношению к сигналу задания. Т. о. в качестве регулятора скорости применяем ПИ – регулятор со следующей передаточной функцией:
7.3 Компенсирующий сигнал
![]() –
компенсирующий сигнал.
–
компенсирующий сигнал.
![]() = 0,229
= 0,229
![]() = 0,041
= 0,041
![]()
![]()
![]()
Так как влияние обратной связи противоЭДС не сильное, то компенсирующий сигнал не используется.
8. Анализ системы подчиненного регулирования
Анализ системы подчиненного регулирования будем производить с помощью программы MATLAB 7.9
8.1. Определение запасов устойчивости системы
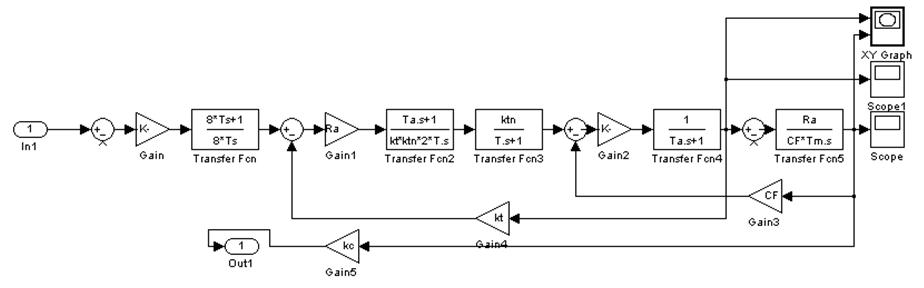
Рис. 8 Разомкнутая структурная схема САУ
Определяем запасы устойчивости по построенным частотным характеристикам (рис. 10).
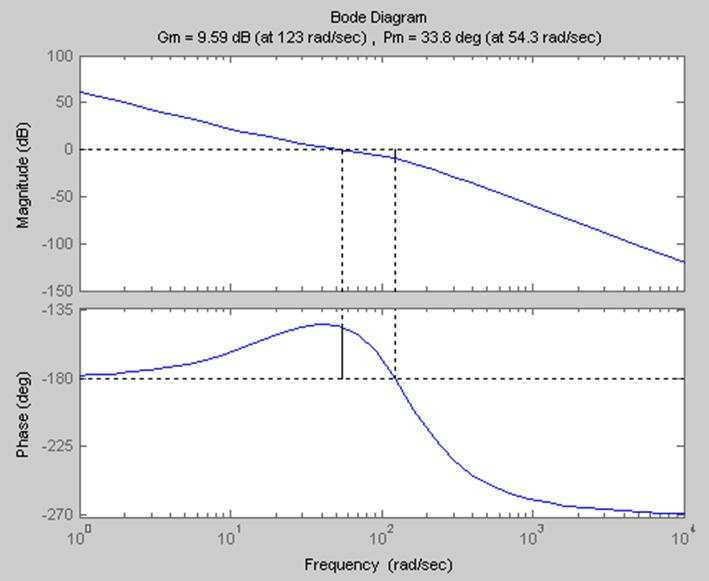
Рис.
9 Запасы: ![]() ,
, ![]()
![]() ,
, ![]() à система
устойчива.
à система
устойчива.
8.2 Построение зависимостей ![]() ,
, ![]() ,
, ![]() при подаче на вход единичного
ступенчатого сигнала
при подаче на вход единичного
ступенчатого сигнала
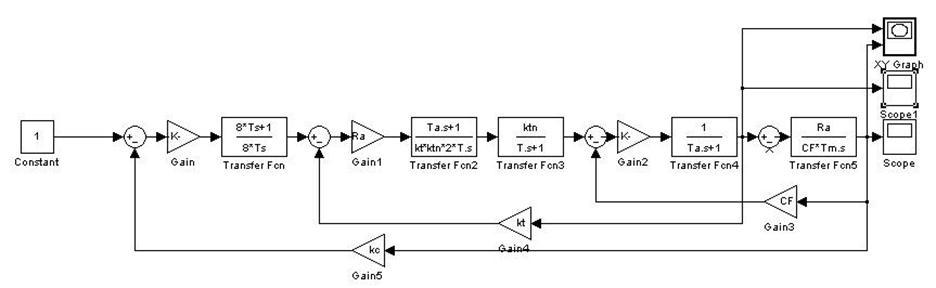
Рис.
10. Структурная схема для построения зависимостей ![]() ,
,
![]() ,
, ![]()
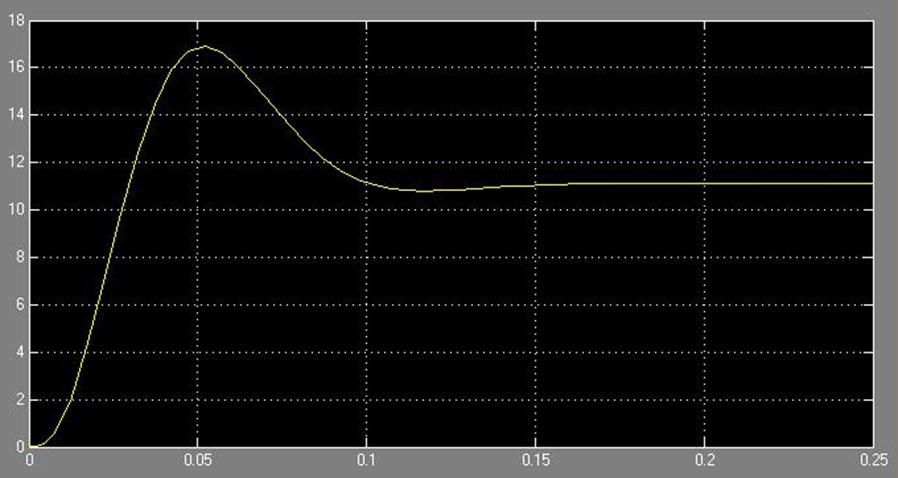
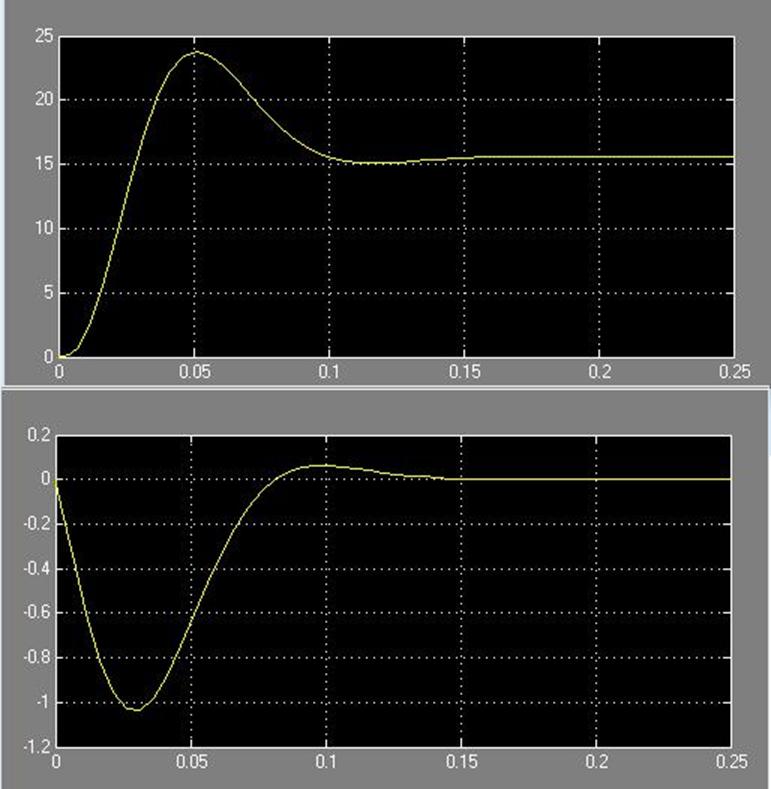
Рис 11. График переходной функции
Из графика можно определить получившиеся показатели качества:
-
перерегулирование 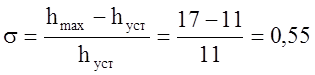
-
время регулирования ![]()
Сравнивая с техническим заданием, видим, что перерегулирование не удовлетворяет заданному, следовательно, необходимо поставить фильтр:
 где
где ![]()
Тогда график переходной функции будет иметь вид:
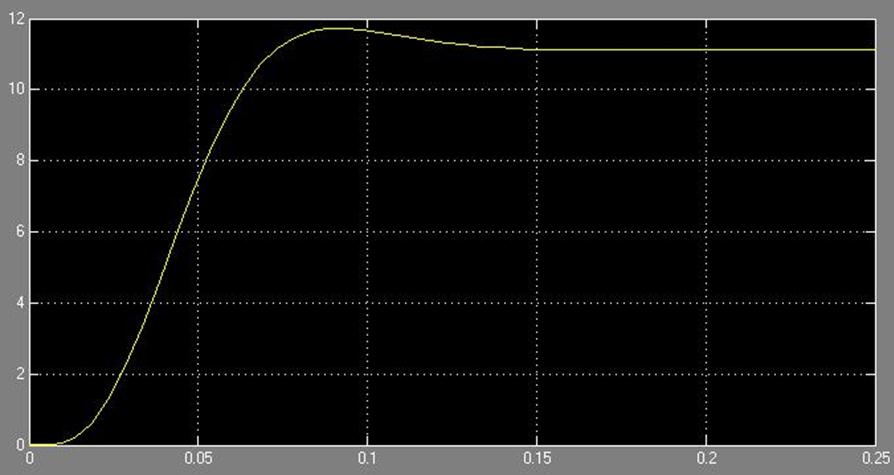
Рис 12. График переходной функции с фильтром
Откуда видно, что
-
перерегулирование 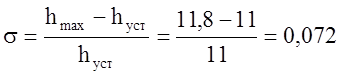 .
.
-
время регулирования ![]()
Время регулирования получается больше, чем в задании, это может быть следствием слишком жестких требований, предъявляемых к приводу, поэтому время регулирования оставляем без изменений.
Построим зависимости ![]() и
w(t)
и
w(t)
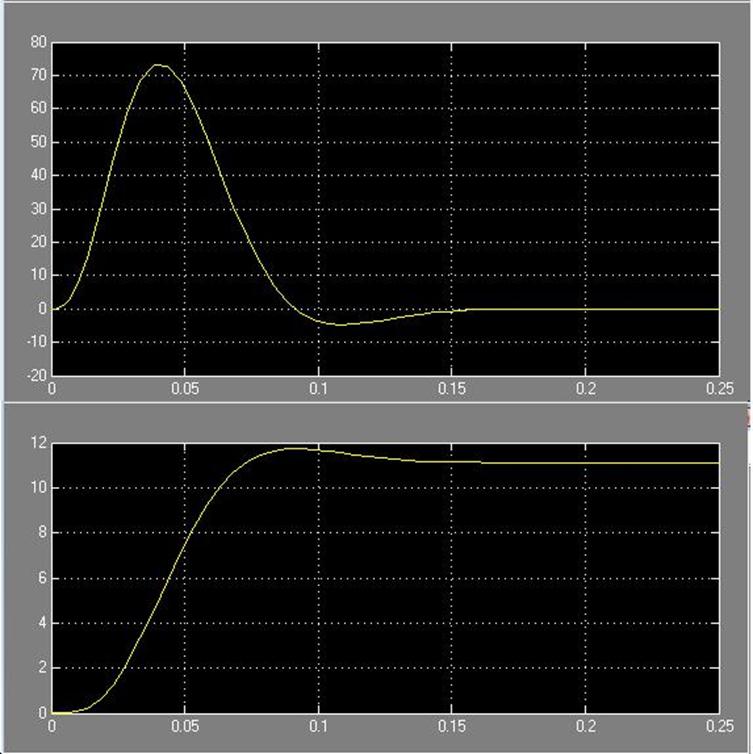
Рис.
13. Зависимости ![]() и w(t
) соответственно
и w(t
) соответственно
Построим зависимость ![]()
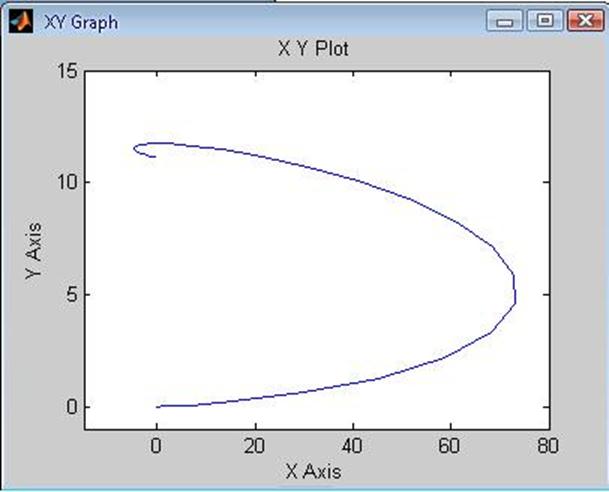
Рис 14. Динамическая электромеханическая характеристика
8.3 Построение графиков реакции САУ на ступенчатое приложение нагрузки Ic/Iн и соответствующей электромеханической характеристики
![]() ,
, ![]()
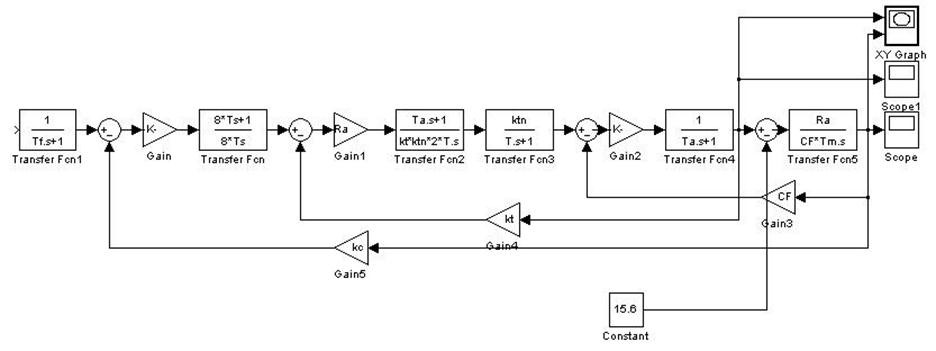
Рис.
15. Структурная схема для построения зависимостей ![]() ,
,
![]() ,
, ![]()
Построим зависимости ![]() и
w(t)
и
w(t)
Рис
16. Зависимости ![]() и w(t
)соответственно
и w(t
)соответственно
Построим зависимость ![]()
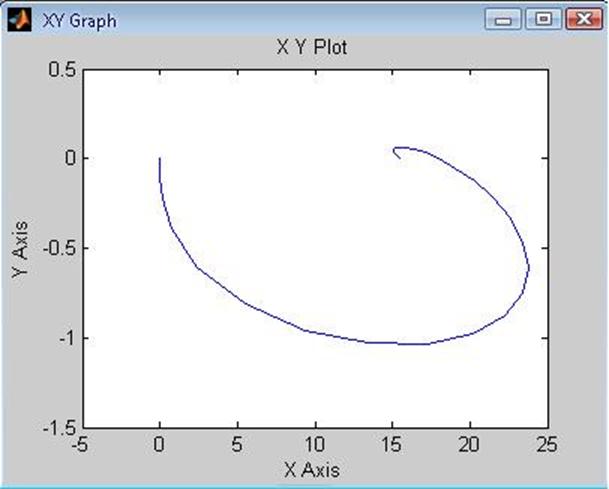
Рис.17. Динамическая электромеханическая характеристика
Определение установившейся ошибки
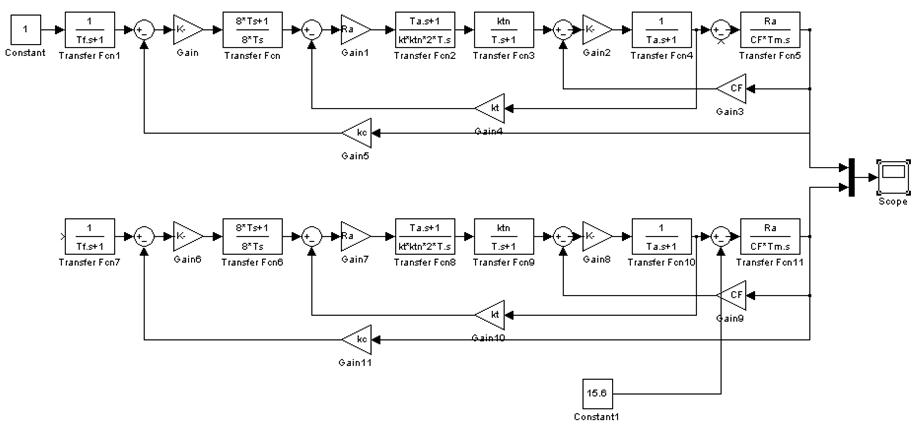
Рис.17.1 Структурная схема
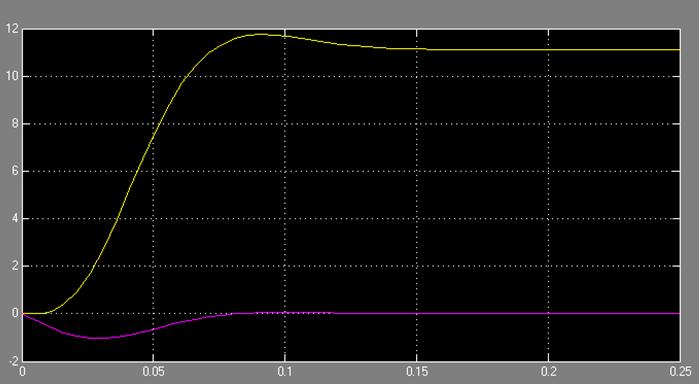
Рис.17.2 Характеристика
По отношению к сигналу нагрузки система астатична, следовательно, еуст = 0.
8.4 Построение графиков изменения во времени угловой скорости вращения и тока якоря двигателя при подаче на вход САУ помехи и соответствующей электромеханической характеристики
Подадим на вход САУ помеху
![]()
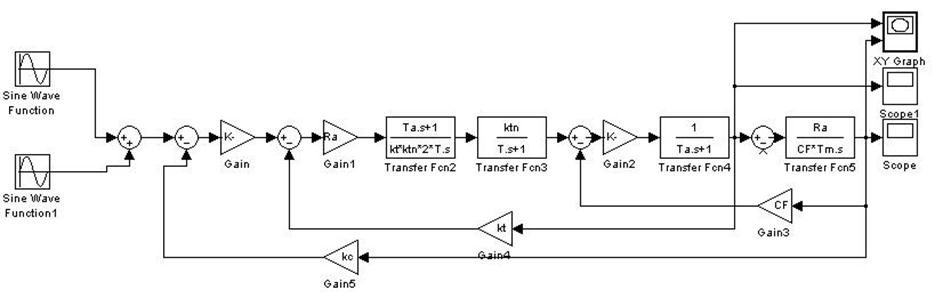
Рис.
18 Структурная схема для построения зависимостей ![]() ,
, ![]() ,
, ![]()
Построим зависимости ![]() и
w(t)
и
w(t)
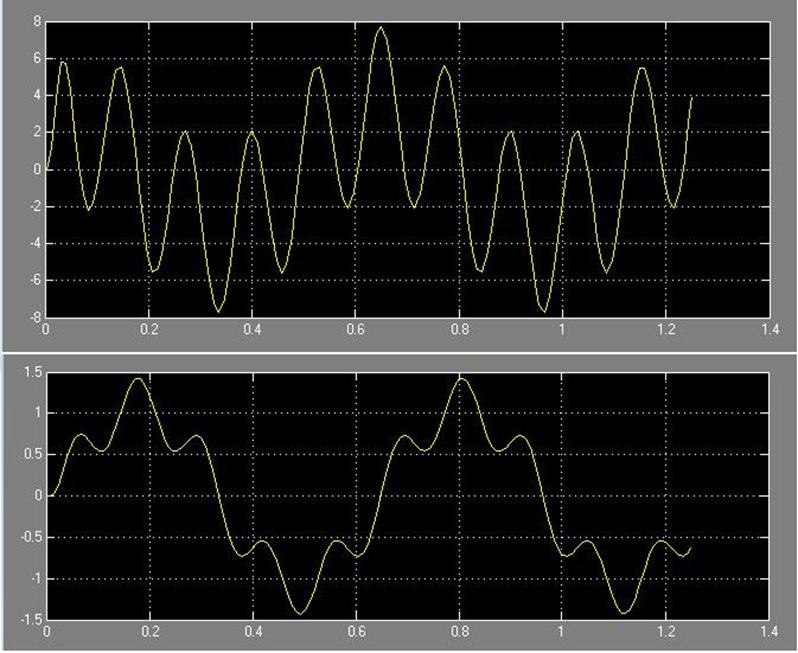
Рис. 19 Графики i(t) и w(t) соответственно с фильтром
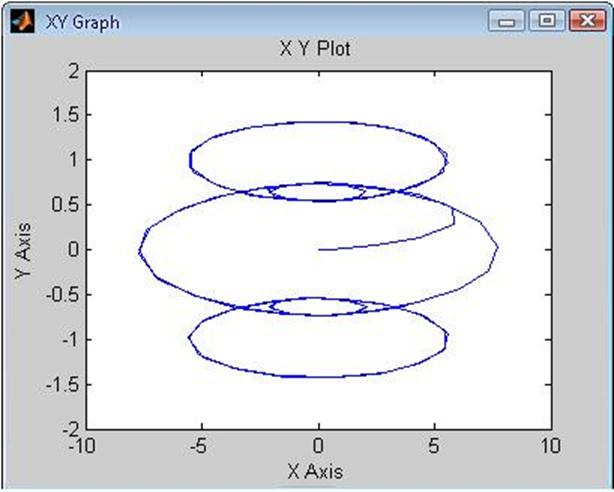
Рис. 20 Динамическая электромеханическая характеристика
8.5. Определение коэффициента передачи
- амплитуда основной
гармоники: ![]()
- амплитуда сигнала на
выходе системы: ![]()
Т.о. коэффициент передачи 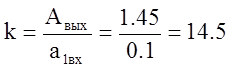
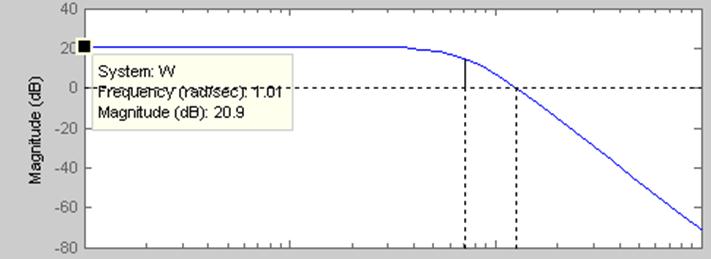
Рис. 21 ЛАЧХ
По графику найдем L(w):
![]() , тогда коэффициент передачи
, тогда коэффициент передачи 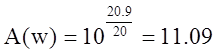
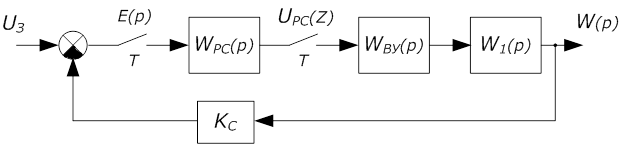
9. Синтез цифрового регулятора скорости
Реализация регулятора скорости в цифровой форме соответствует замене передаточной функции WРС(р) в аналоговой системе передаточной функцией WРС(Z).
а)
б)
Рис. 22. Структурные схемы систем регулирования скорости
(а) – аналоговый вариант, (б) – цифровой вариант
На рис. 22.
W1(р) – передаточная функция подсистемы регулирования тока;
WВУ(р) – передаточная функция восстанавливающего устройства;
Т – период прерывания
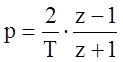
Передаточная функция цифрового регулятора определяется по передаточной функции аналогового прототипа с применением:
– стандартного Z–преобразования, использование которого соответствует замене переменной р в соответствии с выражением
 ;
;
– билинейного преобразования в соответствии с подстановкой
Каждый из способов проделываем для двух периодов прерывания:
![]()
![]()
Z-преобразование:

Билинейное преобразование:
 ,
,

Для реализации восстанавливающего устройства нулевого порядка в MATLAB применяем блок Zero-Order Hold. Во всех дискретных блоках задаем период прерывания.
10. Анализ САУ с цифровым регулятором
10.1. Стандартные Z – преобразования
10.1.1. Найдем запасы устойчивости по амплитуде и по фазе
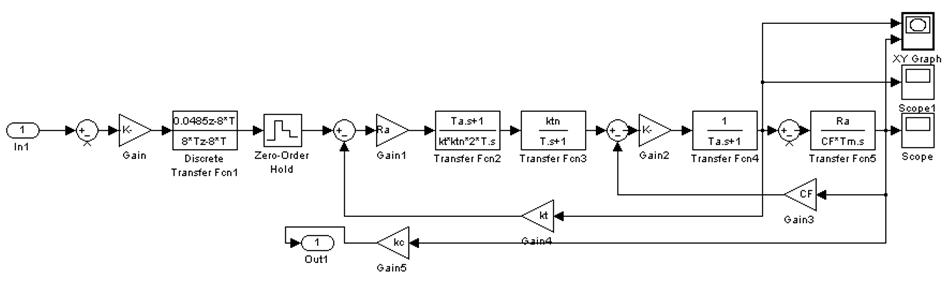
Рис. 23 Структурная схема для определения запасов
T=0.05*Ta
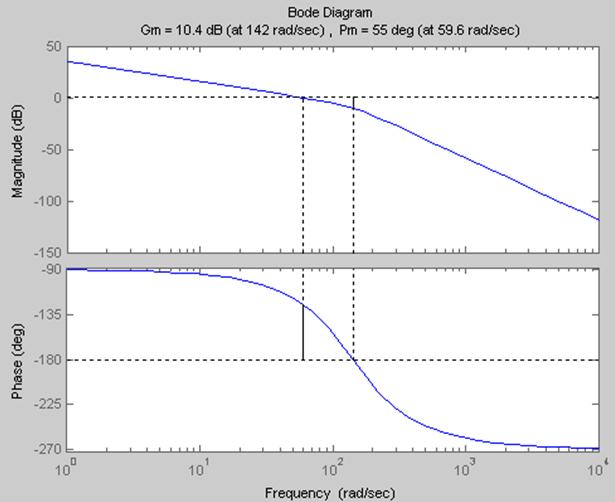
Рис.
24 Запасы устойчивости: ![]() ,
, ![]() ;
;
![]() à
система
устойчива
à
система
устойчива
T=0.5*Ta
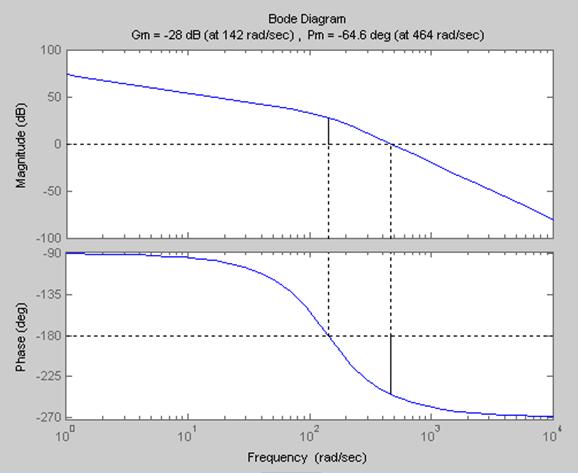
Рис.
25 Запасы: ![]()
![]()
![]() à
система неустойчива
à
система неустойчива
При T=0.5*Ta система не устойчивая. Проделаем дальнейшие опыты, чтобы убедиться в этом.
10.1.2 Построение
зависимостей ![]() ,
, ![]() ,
, ![]() при подаче на вход единичного
ступенчатого сигнала
при подаче на вход единичного
ступенчатого сигнала
Построим зависимости ![]() и
i(t)
и
i(t)
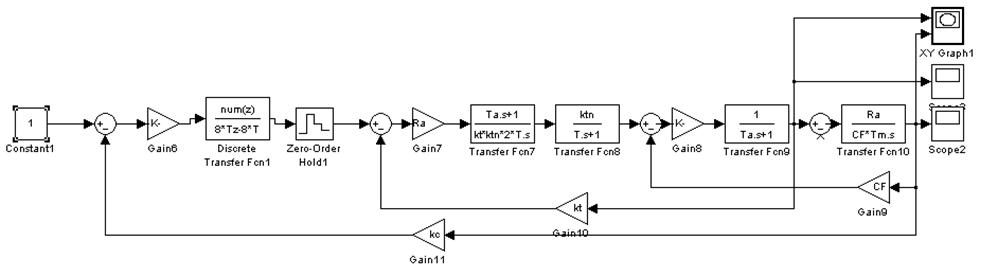
Рис. 26. Структурная схема для построения зависимостей
![]() , i(t)
и w(i)
, i(t)
и w(i)
T = 0.05*Ta
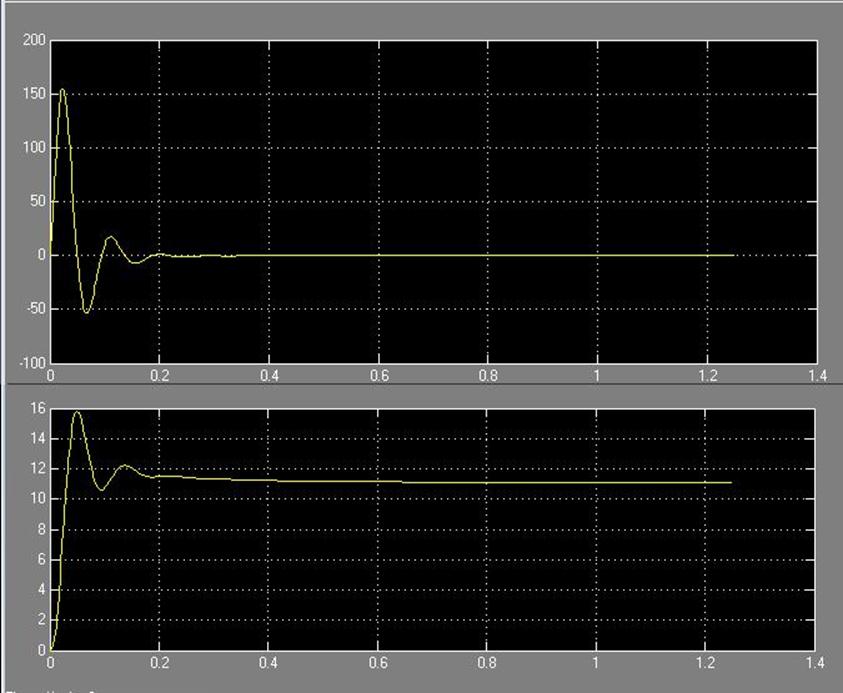
Рис. 27 Зависимость системы i(t) и w(t) с цифровым регулятором без фильтра
Из графика можно определить получившиеся показатели качества:
-
перерегулирование: 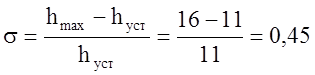
- время регулирования: ![]()
T = 0,5*Ta
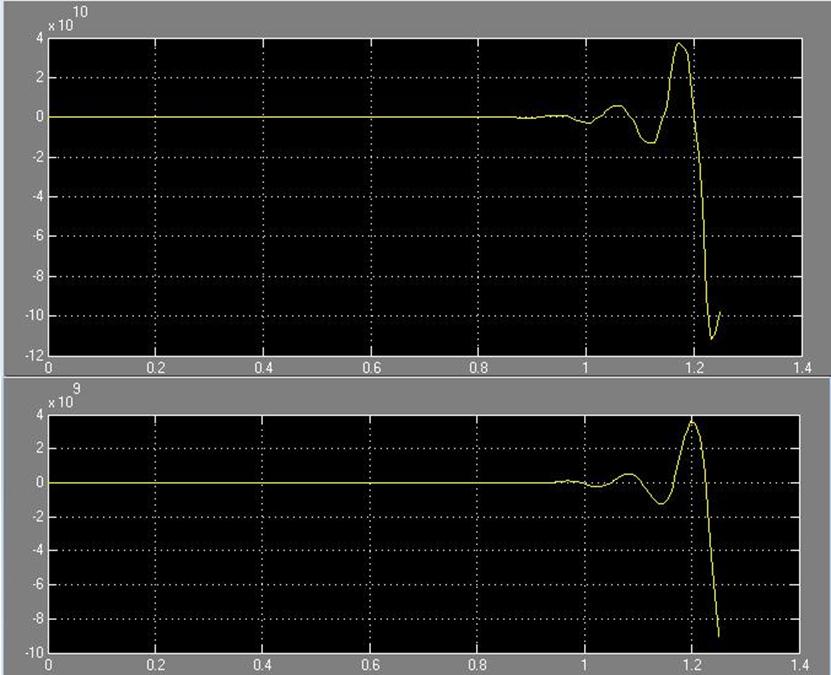
Рис. 28 Зависимость системы i(t) и w(t) с цифровым регулятором соответственно без фильтра
Процессы расходящиеся, следовательно, система неустойчива при T = 0,5*Ta.
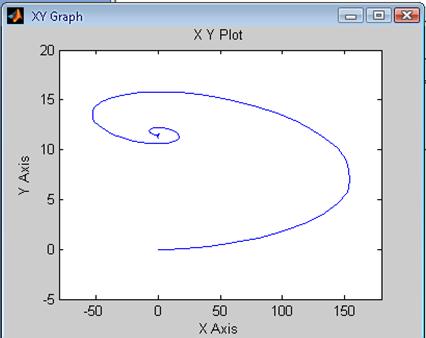
Рис. 29. Зависимость ![]() системы
с Рис. 30 Зависимость системы с
системы
с Рис. 30 Зависимость системы с
цифровым регулятором скорости цифровым регулятором скорости
при T = 0.5*Ta без фильтра при T = 0.05*Ta без фильтра
T = 0.05*Ta
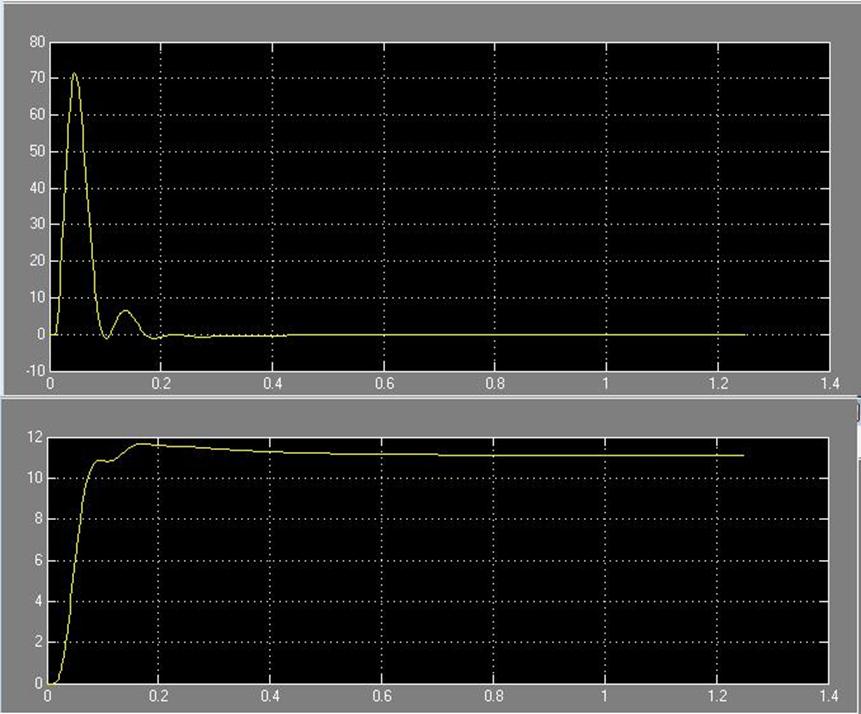
Рис. 31 Зависимость системы i(t) и w(t) с цифровым регулятором с фильтром соответственно
Из графика можно определить получившиеся показатели качества:
- перерегулирование: 
- время регулирования: ![]()
T = 0,5*Ta
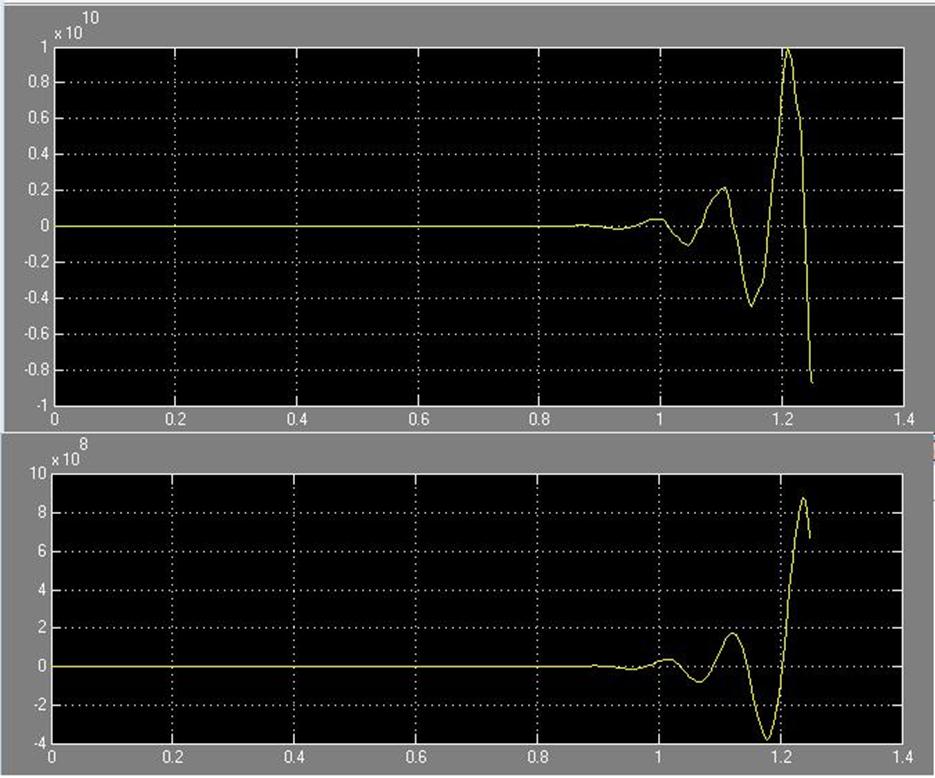
Рис. 32 Зависимость системы i(t) и w(t) с цифровым регулятором с фильтром соответственно
10.1.3. Построение зависимостей ![]() ,
, ![]() ,
, ![]() при ступенчатом приложении нагрузки
при ступенчатом приложении нагрузки
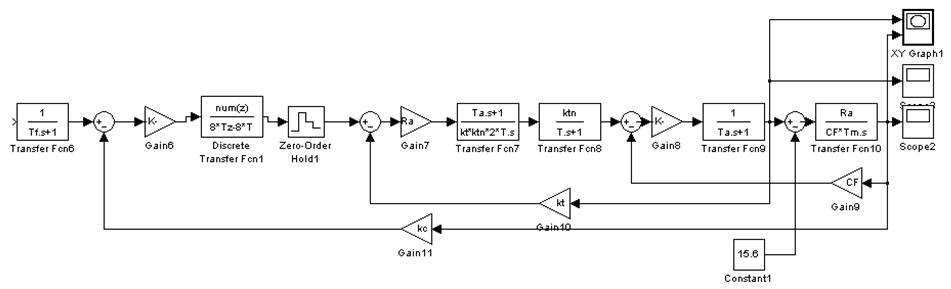
Рис.
33 Структурная схема для построения зависимостей ![]() ,
, ![]() ,
, ![]() с
фильтром
с
фильтром
T = 0.5*Ta
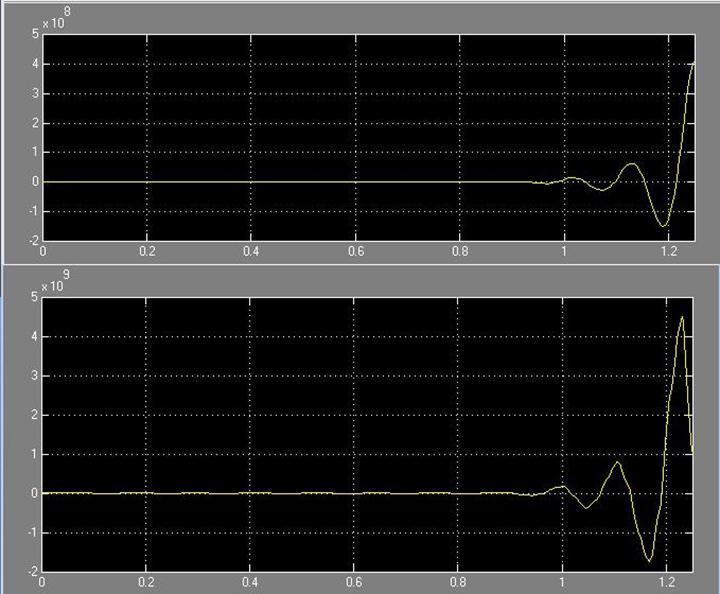
Рис. 34. Зависимость системы w(t) и i(t) с цифровым регулятором с фильтром при ступенчатом приложении нагрузки
T = 0.05*Ta
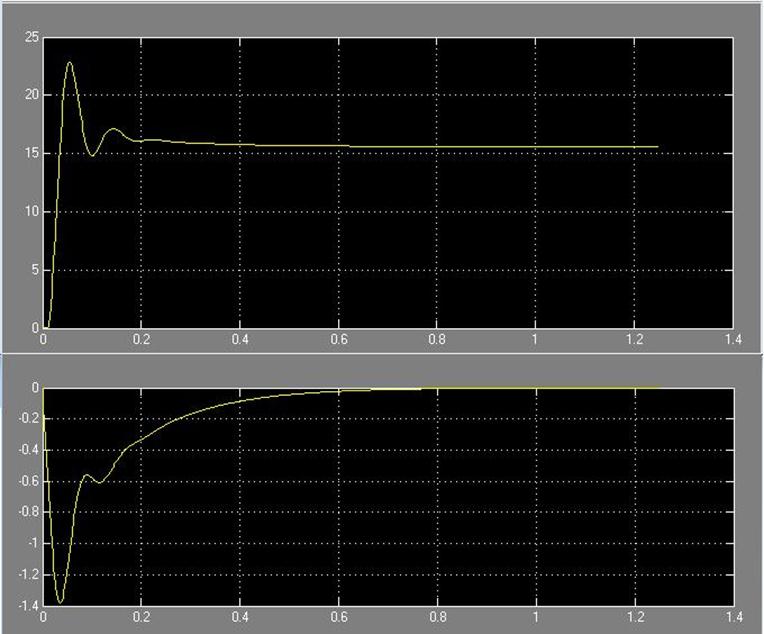
Рис. 35. Зависимость системы i(t) и w(t) с цифровым регулятором с фильтром
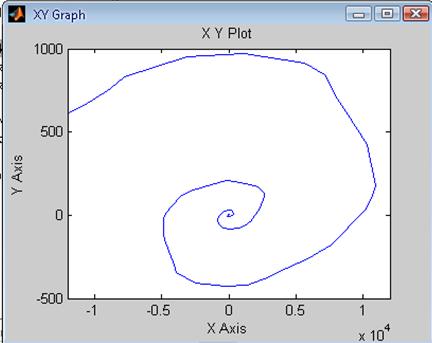
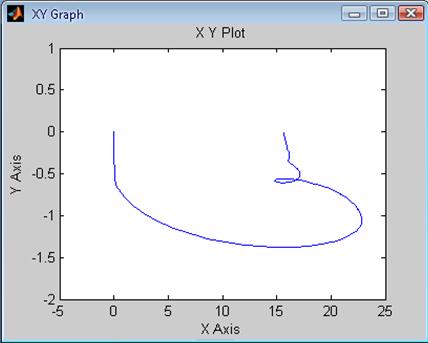
Рис. 36 Зависимость ![]() системы
с Рис. 37 Зависимость системы с
системы
с Рис. 37 Зависимость системы с
цифровым регулятором скорости цифровым регулятором скорости
при T = 0.5*Ta с фильтром при T = 0.05*Ta с фильтром
Определение установившейся ошибки
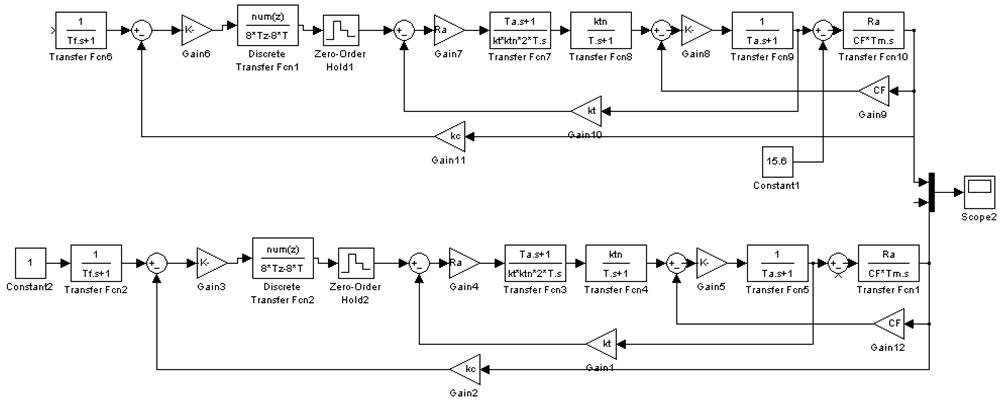
Рис. 37.1 Зависимость системы i(t) и w(t) с цифровым регулятором с фильтром
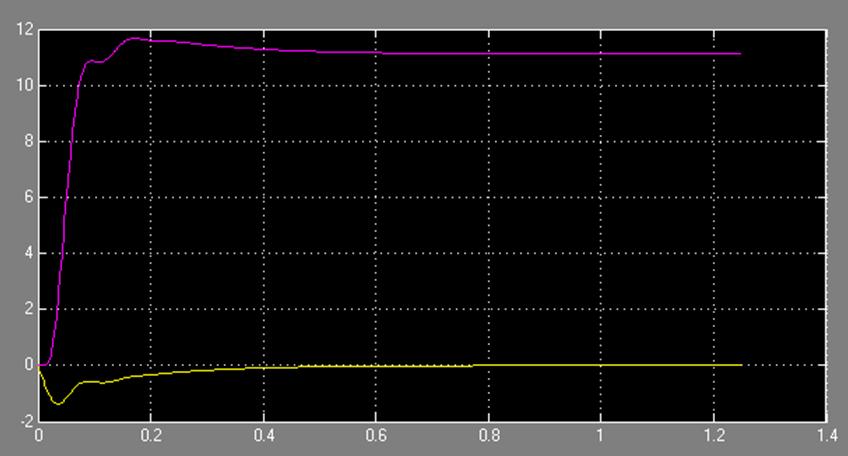
Рис. 37.2 Получившийся процесс
По отношению к сигналу нагрузки, так же как и с не цифровым регулятором скорости, система астатична, следовательно, еуст = 0.
10.1.4. Построение
зависимостей ![]() ,
, ![]() ,
, ![]() при подачи на вход помехи без
фильтра
при подачи на вход помехи без
фильтра
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.