Министерство Высшего и Профессионального Образования
Балаковский Институт Техники Технологии и Управления
Факультет: инженерно-строительный
Специальность: УИТ
Мильниченко А.Н.
Клишин Д.А.
Серегин И.Е.
Рогова Ю.В.
Кравцов Е.Ф.
Принял: преподаватель
Рогова М.В.
2000г.
Цель работы: ознакомление с принципом действия, конструкцией, режимами работы сельсинов в следящих системах автоматики.
На рис.1 показана индикаторная система дистанционной передачи угла. При повороте валана угол a сельсин-датчиком (СД) вырабатывает соответствующий этому углу сигнал, который передается по линии связи (ЛС) на сельсин-приёмник (СП/), где преобразуется в угловое перемещение ротора СП на уголa..
Если роторы сельсинов СД и СП занимают одинаковое положение относительно собственных обмоток возбуждения (0В), то в обмотках фаз синхронизации этих сельсинов наводятся ЭДС: ЕАД=ЕАП, ЕВД=ЕВП, ЕСД=ЕСП. В этом случае разность ЭДС в цепи одноименных фаз обмотки синхронизации равна нулю, так в ЛС (IA = 0, IВ = 0, IС = 0) и система находиться в равновесии. Если же ротор СД сдвинется на угол aД, а ротор СП останется в прежнем положении (aП = 0), то появиться угол рассогласования q:
q = aД – aП
и нарушиться равновесие ЭДС в цепи синхронизации, т.е. ЕАД¹ЕАП, ЕВД¹ЕВП, ЕСД¹ЕСП. А так как одноименные фазы обмотки синхронизации Д и П включены встречно, то в цепи этих обмоток появиться результирующая ЭДС DЕ, под действием которой в обмотках синхронизации Д и П появятся уравнительные токи: IA = DЕА/Z, IВ = DЕВ/Z, IС = DЕС/Z, где Z – суммарное сопротивление току синхронизации Z = ZД + ZП + ZЛ. Эти токи, проходят по виткам фаз обмотки синхронизации, создают магнитодвижущие силы в Д и П. Поперечные составляющие МДС Fдq и Fпq взаимодействуют с магнитными потоками возбуждения и создают в Д и П вращающие синхронизирующие моменты Мсд и Мсп. Т.е. индикаторная система дистанционной передачи угла является само синхронизирующей.
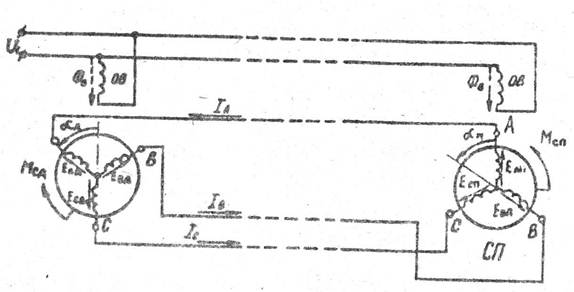
Рис.1. Индикаторная система дистанционной передачи угла.
На рис. 2 показана трансформаторная система дистанционной передачи угла, которая используется для передачи угла поворота на вал рабочего механизма, когда необходим значительный вращающий момент. Основные элементы трансформаторной системы: сельсин-датчик (СД), сельсин-приемник (СП), усилитель мощности (У), исполнительный двигатель (ИМ) и редуктор (Р). Предназначенный для редукции частоты вращения и усиления вращающего момента. В трансформаторной системе токи синхронизации создаются только электродвижущими силами, наведенными с датчиками, не разностью ЭДС, как в индикаторной системе. Результирующая МДС синхронизации по продольной оси, созданная токами синхронизации, создает пульсирующий магнитный поток, который наводит в ОВП ЭДС:
Евых = Еmax Sin aд
Т.е. ОВП выполняет функцию генераторной обмотки. Этот сигнал напряжения Евых » Uвых поступает на вход У, на выход которого включена обмотка управления ИДМ. При этом ротор двигателя приходит во вращение, которое через понижающий редуктор (Р) передается на вал рабочего механизма (РО) и на ротор СП. Т.е. СП самостоятельно не обрабатывает заданный угол поворота, а только выдает сигнал на включение ИД, который осуществляет отработку заданного угла поворота.
Рис. 2. Трансформаторная система дистанционной передачи угла.
Индикаторный режим |
|||||
|
aсд |
0 |
235 |
90 |
22,5 |
135 |
|
aсп |
0 |
230 |
95 |
27 |
135 |
|
q |
0 |
5 |
-5 |
-4,5 |
0 |
Трансформаторный режим |
|||||
|
aсд |
|||||
|
aсп |
|||||
|
q |
|||||
Синхронизирующий режим |
|||||
|
aсд |
|||||
|
aсп |
|||||
|
q |
|||||
Вывод: в ходе данной лабораторной работы ознакомились с принципом действия, конструкцией, режимами работы сельсинов. Сняли показания сельсинов работающих в индикаторном режиме. Обработка результатов измерений показала, что у данной пары сельсинов расхождение показаний по абсолютной величине составляет до 50. Применение этой пары сельсинов для передачи данных целесообразно лишь в приборах где не требуется высокая точность.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.