т.е. каждому линейному отрезку соответствует уравнение параболы. При переходе от одного участка к другому уравнение параболы меняется. Области фазовой плоскости, соответствующие отдельным прямолинейным участкам нелинейности отделяются друг от друга так называемыми линиями переключения. Линия переключения соответствует точкам излома нелинейности и делит фазовую плоскость на области, каждой из которых соответствует своё дифференциальное уравнение. При пересечении линий переключения некоторые коэффициенты уравнения фазовой траектории скачком меняются. В данном случае нелинейность имеет два участка, следовательно, фазовая плоскость разбивается на две части одной линией переключения с уравнением Х = 0. (4)
Фазовый портрет данной системы изображён на рис. 29
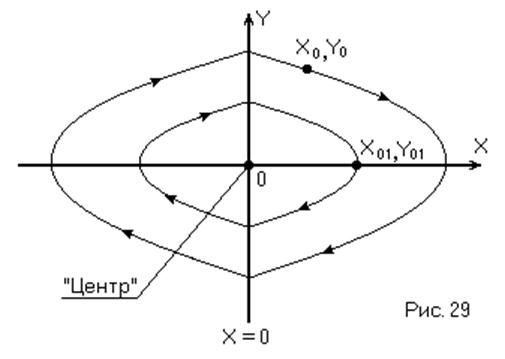
Таким образом, в данном случае имеем устойчивый предельный цикл – автоколебания. Особая точка в данном случае типа «центр».
2) ![]() ,
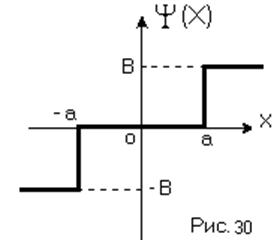
т.е. характеристика релейного элемента имеет вид (рис. 30)
,
т.е. характеристика релейного элемента имеет вид (рис. 30)
Решения уравнения (3) в данном случае запишутся следующим образом:
 -
парабола
-
парабола
![]() -
линия равновесия
-
линия равновесия
 -
парабола
-
парабола
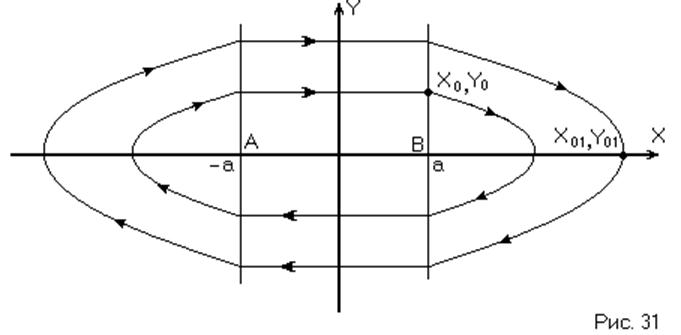
Нелинейный элемент имеет 3 линейных участка, т.е. имеет две линии переключения:
![]() и
и
![]() (5)
(5)
В этом случае имеем устойчивый предельный цикл и особую траекторию – линию равновесия АВ.
3) ![]() ,
т.е. характеристика релейного элемента изображена на рис. 32
,
т.е. характеристика релейного элемента изображена на рис. 32
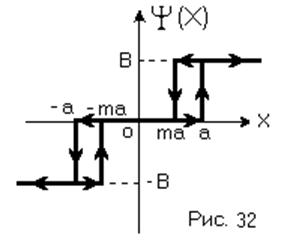

В этом случае нелинейность содержит 5 участков, на фазовой плоскости должны быть 4 линии переключения. Уравнение линий переключения:
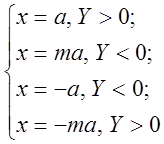
Фазовая траектория соответственно изображена на рис. 33
В данном случае процесс расходящийся и НСАР неустойчива. Таким образом, гистерезис как бы вносит запаздывание в САР, поэтому она становится неустойчивой.
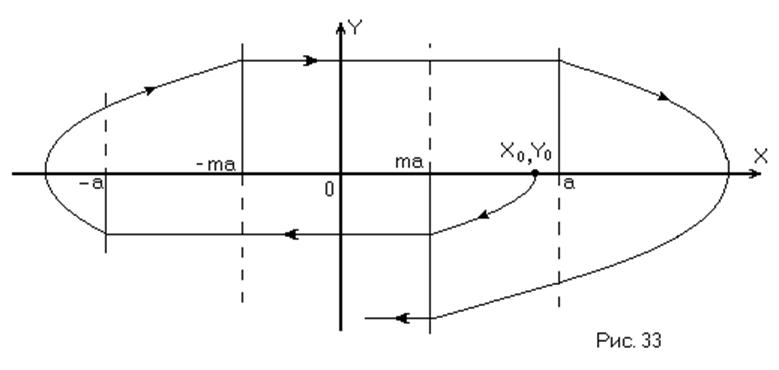
Для стабилизации НСАР введём местную отрицательную обратную связь по скорости:
Составим систему уравнений для данной системы:
 , где
, где 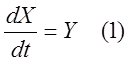
Уравнение свободного движения системы (![]() ) будет иметь вид:
) будет иметь вид:
![]()
Оригинал этого уравнения:
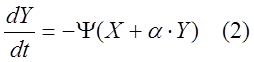
Поделив (2) на (1), найдём дифференциальное
уравнение фазовой траектории:
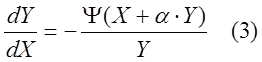
Найдём решение этого уравнения (фазовую траекторию системы) для случаев:
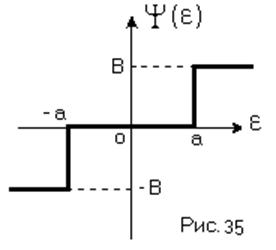
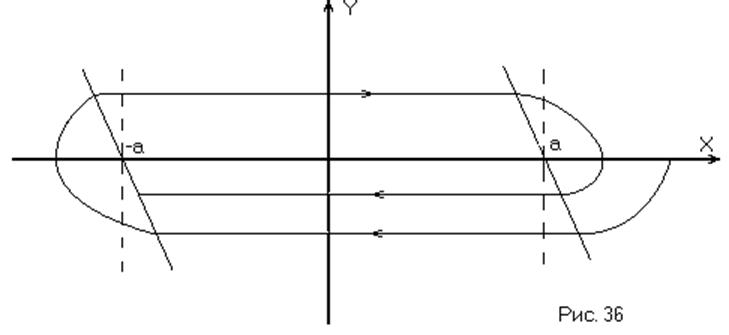
4) ![]() ,
т.е. статическая характеристика нелинейного элемента имеет вид (Рис. 35)
,
т.е. статическая характеристика нелинейного элемента имеет вид (Рис. 35)
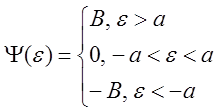
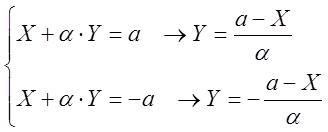
Уравнение линий переключения
(см. случай 2):
Фазовые траектории:
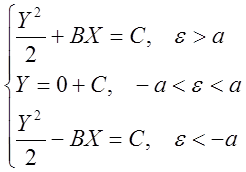
В этом случае фазовая траектория закручивается (рис. 36), т.е. переходный процесс затухает, т.к. обратная связь по скорости вносит в процесс опережение. Линии переключения наклонятся влево, и переключение происходит быстрее.
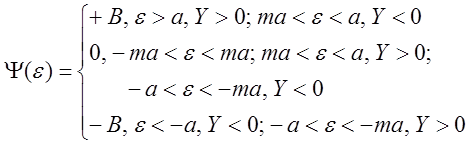
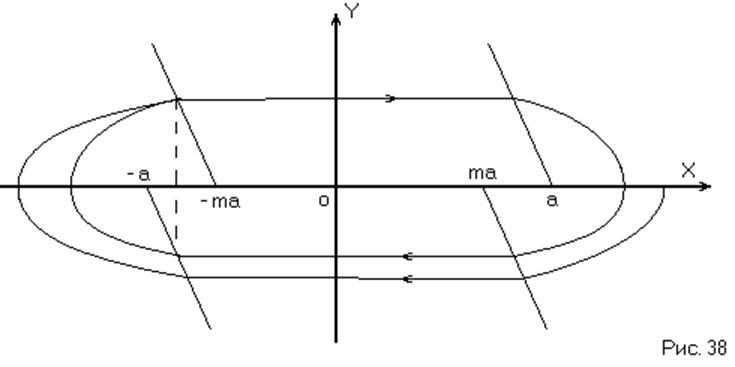
5) Рассмотрим случай, когда характеристика нелинейного элемента имеет вид (рис. 37)
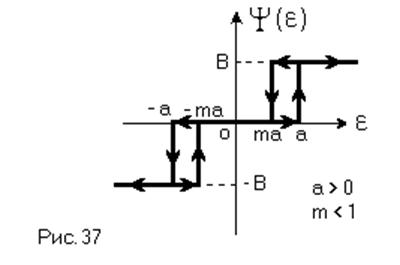
Уравнение линий переключения
(см. случай 3):
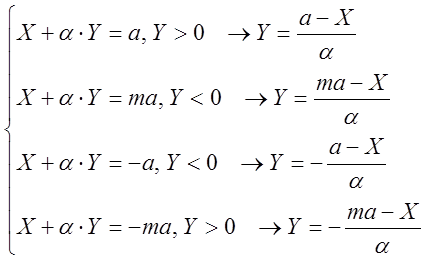
Уравнения фазовых траекторий:
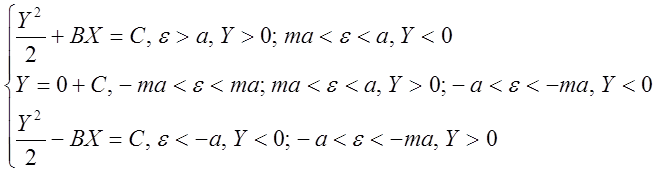
В этом случае также процесс становится затухающим (Рис. 38), в системе имеется предельный цикл.
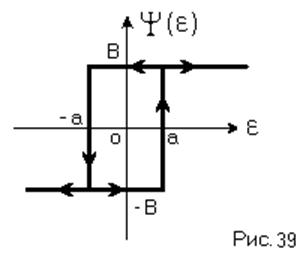 Пусть статическая
характеристика нелинейного элемента имеет вид: (Рис. 39)
Пусть статическая
характеристика нелинейного элемента имеет вид: (Рис. 39)

6) ![]()
Уравнение линии переключения
будут иметь вид:
Уравнения фазовых траекторий
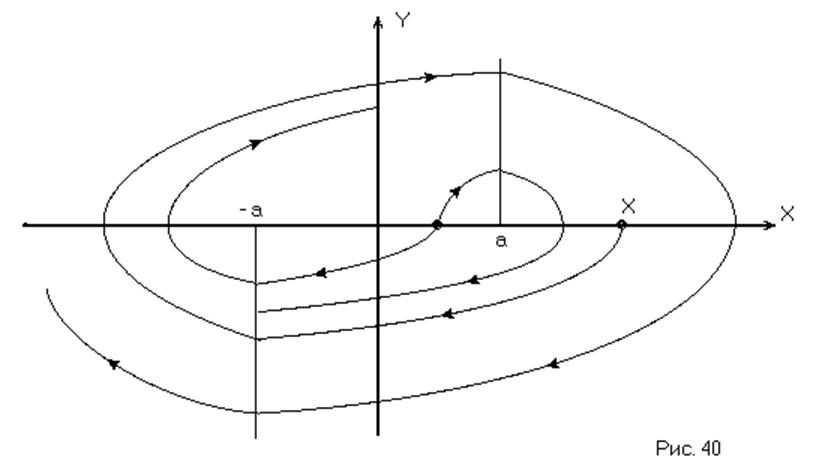
Процесс в системе с фазовым портретом, изображённым на рис. 40, расходящийся, система неустойчива.
7) Для стабилизации системы
введём местную отрицательную обратную связь по скорости (![]() ). В этом случае уравнения линий
переключения получат наклон:
). В этом случае уравнения линий
переключения получат наклон:
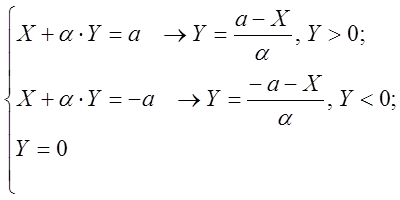
фазовый портрет системы изображён на рис. 41
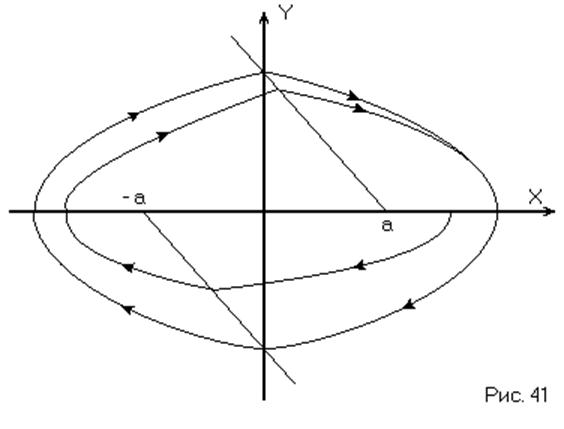
В системе в данном случае имеется предельный цикл
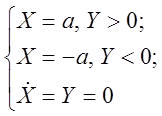
В определённой части фазовой плоскости НСАР с гибкой обратной связью переходит в так называемый скользящий режим. Для примера рассмотрим фазовый портрет НСАР с релейной нелинейностью вида (Рис. 42)
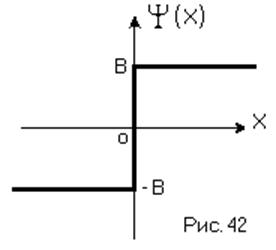
Такой нелинейности соответствует
одна линия переключения СД, уравнение которой ![]() т.е.
т.е.
![]() (1)
(1)
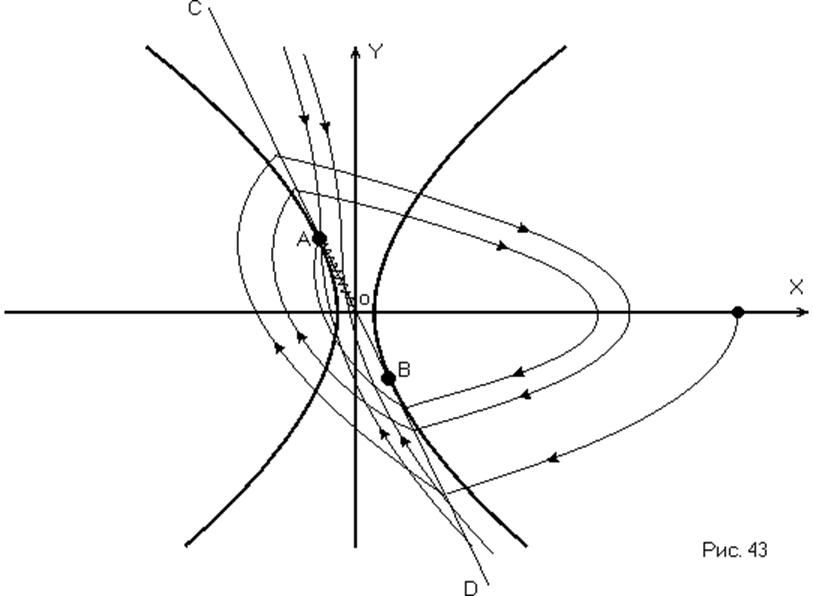
Наклон этой линии может быть
таков, что в точках А и В она касается парабол, поэтому на участка АВ фазовые
траектории подходят к линии переключения с обеих сторон, тогда как вне этого
участка фазовые траектории подходят к линии переключения с одной стороны, с
другой – отходят от неё (рис. 43). Таким образом, при попадании на участок АВ
изображающая точка не может уйти с линии переключения, но она не может и
остаться на одном месте, т.к. ![]() . При
. При ![]() (участок АО) изображающая точка
движется вправо, т.е. к началу координат; при
(участок АО) изображающая точка
движется вправо, т.е. к началу координат; при ![]() (участок
ВО) – то же. Следовательно, при попадании на участок АВ изображающая точка
движется по линии переключения к началу координат. Такой режим называется
скользящим. При работе в этом режиме уравнение движения изображающей точки
определяется уравнение линии переключения, а так как обычно это уравнение
линейно, то этот случай имеет чрезвычайно важное для практики значение,
нелинейное уравнение в этом режиме превращается в линейное. Другими словами мы
имеем так называемую скользящую линеаризацию релейных систем.
(участок
ВО) – то же. Следовательно, при попадании на участок АВ изображающая точка
движется по линии переключения к началу координат. Такой режим называется
скользящим. При работе в этом режиме уравнение движения изображающей точки
определяется уравнение линии переключения, а так как обычно это уравнение
линейно, то этот случай имеет чрезвычайно важное для практики значение,
нелинейное уравнение в этом режиме превращается в линейное. Другими словами мы
имеем так называемую скользящую линеаризацию релейных систем.
Этот способ часто используется для линеаризации прямолинейных регуляторов. Физический смысл скользящего режима: на линии переключения реле должно переключатся, поэтому физически скользящий режим заключается в бесконечно быстрых переключениях реле, происходящих с бесконечно большой частотой и вызывающих бесконечно малые изменения выходной величины. Практически эти колебания имеют конечную частоту, поэтому скользящий режим фактически реализуется не в виде плавного скольжения по линии переключения, а виде вибраций малой амплитуды и большой частоты вокруг линии переключения.
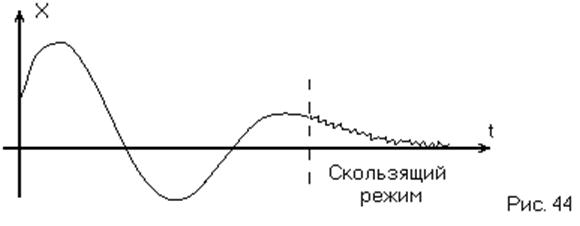 Итак, в начале САР
ведёт себя как нелинейная, и переходный процесс колебательный (по закону
параболы). При попадании на участок АВ возникает скользящий режим и переходный
процесс заканчивается апериодическим хвостом. (Рис. 44)
Итак, в начале САР
ведёт себя как нелинейная, и переходный процесс колебательный (по закону
параболы). При попадании на участок АВ возникает скользящий режим и переходный
процесс заканчивается апериодическим хвостом. (Рис. 44)
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.