Замечание: Так как изменение Кd повлечёт за собой необходимость внесения изменений и в другие звенья схемы (пропорциональное звено после уставки) более целесообразным является не меняя Кd = 0.1 изменять Кp.
Теоретически статизм можно рассчитать следующим образом:
![]()
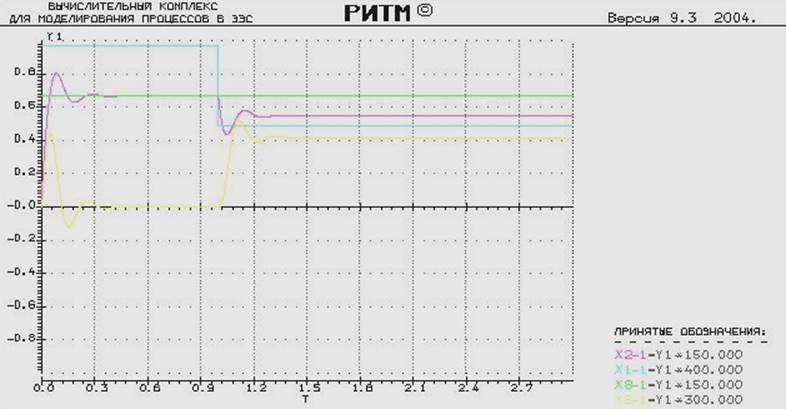
Отсюда следует, что теоретически статизм меньше или равен 5 % при Кр ≥ 81 (Кd = 0.1) (в пределах области устойчивости). По данным условиям (Кd = 0.1 и Кр = 81) проведён опыт:

Х1 – сигнал на выходе основного источника
Х2 – сигнал на выходе нагрузки (регулируемая величина)
Х6 – сигнал на выходе исполнительного механизма
Х8 – сигнал на выходе уставки
Длительность переходного процесса 0.7 сек. по осциллограмме и теоретически:
![]()
По результатам опыта определим статизм:
![]()
Таким образом значение статизма попадает в допустимый интервал. Но значение перерегулирования превышает допустимое:
Опытное значение перерегулирования:
![]()
Теоретическое значение перерегулирования:
a0 = 287; a1 = 27.22*103; a2 = 82.96*104; a3 = 4.1152*106 Кр Кд+8*106
|
|
![]()
![]()
Для уменьшения величины перерегулирования нужно уменьшить μ, а для этого нужно уменьшать Кd*Кр. Из приведённой формулы для теоретического определения значения перерегулирования можно найти максимальный Кр, при котором будет обеспечена требуемая величина перерегулирования (не более 30%):
|
|
![]()

![]()
Для обеспечения значения перерегулирования не более 30 % необходимо, чтобы Кр ≤ 35 (при Кd = 0.1). По данным условиям (Кd = 0.1 и Кр = 35) проведён опыт:
Х1 – сигнал на выходе основного источника
Х2 – сигнал на выходе нагрузки (регулируемая величина)
Х6 – сигнал на выходе исполнительного механизма
Х8 – сигнал на выходе уставки
Длительность переходного процесса 0.4 сек. по осциллограмме и теоретически:
![]()
По результатам опыта перерегулирование составило:
![]()
что является допустимым. Но статизм по результатам опыта равен:
![]()
Теоретически:
![]()
Для обеспечения требуемого статизма необходимо, чтобы Кd*Кр ≥ 8.1. Для обеспечения требуемой величины перерегулирования нужно, чтобы Кd*Кр ≤ 3.5. Очевидно, выполнение обоих требований в данной системе невозможно. Таким образом, для того чтобы обеспечить выполнение поставленных требований необходимо оптимизировать САУ.
|
|
|
 |
|||
![]()
![]()
![]()
![]()
![]()
![]()
![]()
 |
В связи с необходимостью сделать низковольтной компенсационную часть системы выбраны следующие параметры её составляющих:
Wпр: k = 0.1 (пропорциональное звено)
Wик: Т = 0.05 с; k = 10 (исполнительный механизм системы компенсационного управления – инерциальное звено 1-го порядка).
Еуст = 38.88 В
Таким образом в новой системе статизм должен быть равен нулю.
Данная схема была промоделирована (Кd = 0.1 и Кр = 35):

Х1 – сигнал на выходе основного источника
Х2 – сигнал на выходе нагрузки (регулируемая величина)
Х6 – сигнал на выходе исполнительного механизма системы регулирования
Х8 – сигнал на выходе уставки
Х14 – сигнал на выходе исполнительного механизма системы компенсационного управления
По результатам опыта:
1). Статизм равен нулю (теоретически и в опыте)
2). Перерегулирование находится в пределах допустимых значений:
![]()
Теоретически:
a0 = 287; a1 = 27.22*103; a2 = 82.96*104; a3 = 4.1152*106 Кр Кд+8*106
|
|
![]()
![]()
3). Длительность переходного процесса 0.4 сек. по осциллограмме и теоретически:
![]()
14. Повышение быстродействия САУ
Увеличить быстродействие системы не менее, чем в два раза, не допуская при этом, чтобы напряжение на нагрузке превосходило двукратное значение 100% ЭДС основного источника.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.