Содержание:
1. Анализ исходных данных.
2. Описание работы системы.
3. Составление структурной схемы системы.
4. Определение передаточных функций звеньев.
5. Определение передаточных функций системы.
6. Синтез корректирующих звеньев.
7. Анализ показателей качества синтезированной системы по результатам моделирования
Система автоматического управления (далее по тексту САУ, или «система») предназначена для линейного перемещения горизонтального стола применительно к станкам фрезерной или координатно-расточной групп.
Блок-схема системы автоматического управления приведена на рис. 1, а комбинированная схема силовой части - на рис. 2. САУ построена как система подчиненного регулирования, выполненная по контурам напряжения (тока), скорости, положения. В контуре напряжения (тока) имеется нелинейный элемент (на схеме не показан).
На рисунках приняты следующие обозначения:
![]() -
управляющее воздействие;
-
управляющее воздействие;
![]() -
управляемая (регулируемая) координата;
-
управляемая (регулируемая) координата;
![]() -
ошибка системы;
-
ошибка системы;
![]() -
сигнал задания по управляющему воздействию;
-
сигнал задания по управляющему воздействию;
![]() -
сигнал главной обратной связи по
регулируемой координате;
-
сигнал главной обратной связи по
регулируемой координате;
![]() -
сигнал по ошибке;
-
сигнал по ошибке;
ЧЭ - чувствительный элемент;
РП - регулятор положения;
У, КЗ - усилитель и корректирующее звено в контуре положения;
РС - регулятор скорости;
РН - регулятор напряжения (тока);
ТП- транзисторный (тиристорный) преобразователь;
М - исполнительный двигатель;
Р1 - механический редуктор силовой;
МП - механическая передача (шариковинтовая передача (ШВП));
Н - нагрузка (стол с деталью);
ДН, У - датчик напряжения, усилитель;
ТГ - тахогенератор;
Р2 - механический редуктор, приборный;
ДОС - датчик обратной связи;
ВТ - вращающийся трансформатор;
ПФН - преобразователь фаза-напряжение;
U1, U2,U3, UЯ - промежуточные координаты (управляющие напряжения соответственно РС, РН, ТП, ИД);
jД, j1, j2 - промежуточные координаты (угол поворота соответственно ИД, ШВП, ВТ);
![]() ,
,
![]() -
выходное напряжение, соответственно, ТГ и ВТ.
-
выходное напряжение, соответственно, ТГ и ВТ.
 |
Рис.1 Блок-схема системы автоматического управления.
Рис.2 Комбинированная схема силовой части САУ
I. Анализ исходных данных
При проектировании всех технических устройств и систем исходным документом является техническое задание (ТЗ). Аналогом ТЗ при выполнении настоящей работы являются исходные данные, приведенные выше. В пояснительной записке необходимо привести все данные согласно пунктам раздела «Исходные данные». Взятые из таблиц сведения даются в следующей форме: название параметра (характеристики), условное обозначение, единицы измерения, числовое значение.
1.1. Характеристики исполнительного двигателя:
- мощность двигателя Р, кВт 1.0
- частота вращения n, об/мин 1500
- напряжение на якоре Uя, В 110
- ток якоря Iя, А 9,1
- активное сопротивление якорной цепи двигателя Rя, Ом 1,2
- индуктивность якоря цепи Lя, мГн. 1,87
- момент инерции собственных вращающихся частей двигателя Jя, кгм2 0,75 *10-3
1.2. Тип и параметр преобразователя:
- тип управляемый выпрямитель
- частота питания преобразователя F, Гц 400
- напряжение управления Uу, В 15
- число фаз n 1
- активное сопротивление тиристорного преобразователя Rтп, Ом 0,48
- индуктивность тиристорного преобразователя Lтп, мГн 2,4
1.3. Вид и параметры регуляторов контуров:
- регулятор положения пропорциональный; К2=5
- регулятор скорости пропорциональный; К4=3
- регулятор напряжения пропорционально-интегральный;
0,03+1/p
1.4. Параметры схемы:
- максимальное перемещение Xmax, мм 250
- шаг винта ШВП γ, мм 6
- цена оборота ДОС β, мм 1
- цена импульса Δ, мм 0,001
1.5. Параметры управляющего воздействия, динамические характеристики САУ:
- максимальная скорость Vмакс, м/мин 15
- кинетическая ошибка δк, мм 2
- перерегулирование σ, % 35
- время переходного процесса tпп, с 0,075
- число перерегулирования n 3
Параметры нелинейных элементов а1 = 0,1
а2 = 0,7
В = 0,6
 |
Входной сигнал подается на ЧЭ, на котором сравнивается с сигналом обратной связи. Затем сигнал подается на РП, представляющий собой звено с ПФН и ВТ после которого усиливается и корректируется на КЗ. Далее сигнал поступает на РС, служащий для поддержания постоянной скорости передвижения исполнительного механизма, затем после РС поступает на РН, контролирующий напряжение. Он позволяет регулировать скорость двигателя в широком диапазоне за счет ширины выдаваемых прямоугольных импульсов ИД через регулятор Р1 вращает механизм передачи, являющийся ШВП. Для контроля перемещения ШВП стоит ВТ, соединенный с винтом передачи с помощью редуктора Р2.
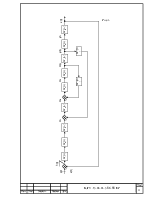
В соответствии с исходной блок-схемой приведена структурная схема системы (на рисунке 3). Общие правила ее составления следующие:
3.1. Система представляется в виде совокупности звеньев и их взаимосвязи согласно заданной блок-схеме.
3.2. Элементы, формирующие сигнал единичной обратной связи с единицей измерения управляющего для (системы) контура сигнала, показываются в цепи обратной связи. Далее при описании замкнутой системы коэффициент передачи звена (совокупности звеньев) принимается равным единице.
3.3. Элемент, выполняющий сравнение (вычитание) сигналов задания и главной обратной связи, вносится в прямой тракт в виде автономного элемента или в совокупности с элементами, формирующими сигнал главной обратной связи. На схеме дается условное обозначение элемента сравнения, его коэффициент передачи принимается равным единице.
3.4. При замыкании внутренних контуров местной единичной обратной связью поступают аналогично пп. 3.2 и 3.3.
3.5. Нумерация передаточных функций дается в индексах, порядок нумерации слева направо.
3.6. Показываются входная и выходная координаты, ошибка и необходимые для использования в расчетах промежуточные координаты.
Приводится структурная схема системы, и дается расшифровка обозначения
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.