Датчик смещения, в котором используется изменение магнитного сопротивления, включается в мостовую схему с целью получения линейной передаточной характеристики. Использование двух таких датчиков с изменяемым магнитным сопротивлением в мостовой схеме, кроме обеспечения линейности, сводит к нулю силу взаимодействия между сердечником и якорем. Эта магнитная сила может быть достаточно большой, значительно отличаясь от силы Кулона в емкостном датчике. Из условия баланса энергии можно вывести, что
при условии, что через катушку индуктивности протекает постоянный ток от источника тока. Так как L(x) – нелинейная функция х, то сила F зависит от х.
Величину индуктивности, являющуюся мерой смещения, можно определить, используя мостовую схему или включив катушку индуктивности в схему генератора.
Индуктивным датчиком, в котором используется изменение взаимной индукции между двумя катушками, является дифференциальный трансформатор. Как следует из названия, этот датчик используется в балансной схеме (см. рис. 3.9). Величина связи между первичной и вторичной обмотками зависит от положения сердечника. Например, если сердечник сдвинут вверх (рис. 3.9(а)), то связь между первичной обмоткой и
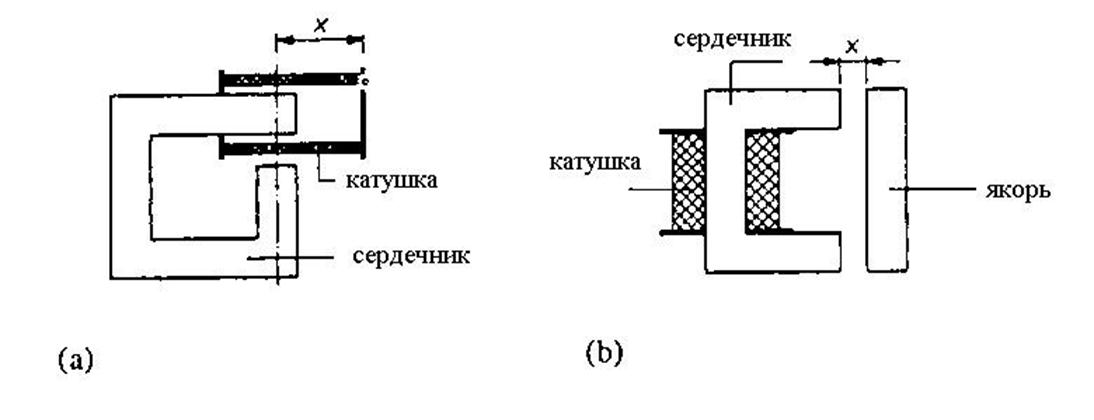
Рис. 3.8. (а) Индуктивный датчик смещения, основанный на изменении действующего числа витков. (b) Индуктивный датчик с изменяемым сопротивлением.
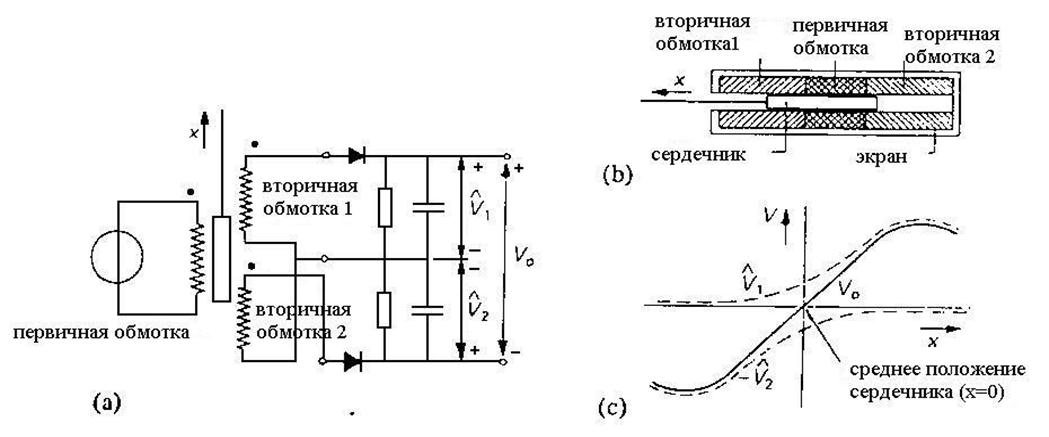
Рис. 3.9. (а) Дифференциальный трансформатор для измерения смещения с двумя пиковыми детекторами. (b) Поперечный разрез дифференциального трансформатора. (с) Передаточная характеристика V=V(x).
верхней
вторичной обмоткой увеличивается и поэтому увеличивается выходное напряжение на
этой обмотке. Переменное напряжение верхней вторичной обмотки преобразуется
пиковым детектором в постоянное напряжение ![]() .
На рис. 3.9(с) это напряжение представлено как функция положения х
сердечника. На графике хорошо видна сильная нелинейность этой функции.
Выпрямленное напряжение нижней вторичной обмотки представлено на том же графике
как
.
На рис. 3.9(с) это напряжение представлено как функция положения х
сердечника. На графике хорошо видна сильная нелинейность этой функции.
Выпрямленное напряжение нижней вторичной обмотки представлено на том же графике
как ![]() . Сумма этих двух напряжений образует
выходное напряжение
. Сумма этих двух напряжений образует
выходное напряжение ![]() . Для малых смещений х
центра сердечника относительно положения х=0 выходное напряжение V0 линейно зависит от х:
нелинейность характеристик двух рассмотренных цепей полностью компенсируется.
Дифференциальная чувствительность рассмотренного датчика смещения
пропорциональна напряжению источника, подключенного к первичной обмотке.
. Для малых смещений х
центра сердечника относительно положения х=0 выходное напряжение V0 линейно зависит от х:
нелинейность характеристик двух рассмотренных цепей полностью компенсируется.
Дифференциальная чувствительность рассмотренного датчика смещения
пропорциональна напряжению источника, подключенного к первичной обмотке.
Существуют дифференциальные трансформаторы для измерения смещения в диапазонах от ±1 мм до ±25 см. Нелинейность во всем диапазоне равна приблизительно 2,5*10-3. Рабочие частоты находятся в пределах от 50 ГЦ до 10 кГц. Чувствительность дифференциального трансформатора при расположении сердечника в среднем положении и напряжении питания 1 В составляет для диапазона измерения ±1 мм величину порядка 240 мкВ/мкм, а для диапазона ±25 см – приблизительно 4 мкВ/мкм.
Оптические датчики смещения
Смещение можно обнаружить также оптически с помощью кодирующей ленты (при поступательном движении) или поворотного кодера (при вращении). На рис. 3.10(а) показан оптический датчик смещения, в котором применена кодирующая лента, на которой в несколько рядов чередуются прозрачные и непрозрачные участки. Положение ленты преобразуется непосредственно в цифровой сигнал узким лучом света и рядом световых датчиков. Цифровой код определяется расположением прозрачных и непрозрачных полос на ленте.
Необходимо отметить, что обычно код, используемый в оптическом преобразователе – не простой двоичный код, как показано на рис. 3.10(а). Основной недостаток простого двоичного кода состоит в том, что даже при совсем небольшом смещении могут измениться сразу несколько битов. Из-за конечной разрешающей способности системы оптического обнаружения, может возникнуть ситуация, при которой только часть (но еще не все) биты изменились. Это (переходное) состояние может соответствовать совершенно другому положению кодирующей ленты. Поэтому обычно выбирается код, в котором одновременно изменяется не более одного бита, например, код Грея.
Датчики смещения, в которых применяются поворотный или ленточный кодеры, имеют фиксированное положение нуля. Поэтому они относятся к абсолютным датчикам смещения. Особенно удобны эти датчики для подключения к компьютеру для цифрового управления перемещением.
В качестве альтернативы методу кодирования абсолютного положения по отношению к ленте можно использовать также единственную дорожку чередующихся прозрачных и непрозрачных полос. Тогда изменение положения можно определить, подсчитывая число импульсов света. Этот метод не имеет фиксированного положения нуля и поэтому измеряет приращение смещения. В основе измерения лежит измерение интервала. Здесь разрешающая способность определяется наименьшим различимым расстоянием между двумя смежными линиями решетки. Это расстояние ограничено световым датчиком и составляет обычно 1 мм. Если желательно более высокое разрешение, можно воспользоваться муаровым изображением, как это показано на рис. 3.10(b). Дополнительная решетка помещается перед основной измерительной решеткой под небольшим углом, что создает картину светлых и темных полос, передвигающихся вертикально, когда измерительная решетка перемещается горизонтально. Когда решетка перемещается на расстояние, равное расстоянию между двумя линиями решетки, лучи будут перемещаться на расстояние, точно равное их собственной ширине. Расстояние между лучами и ширина лучей определяются углом между передней решеткой и измерительной решеткой. Когда датчик света помещается позади этой конструкции, создается впечатление, будто расстояние между линиями решетки увеличилось.
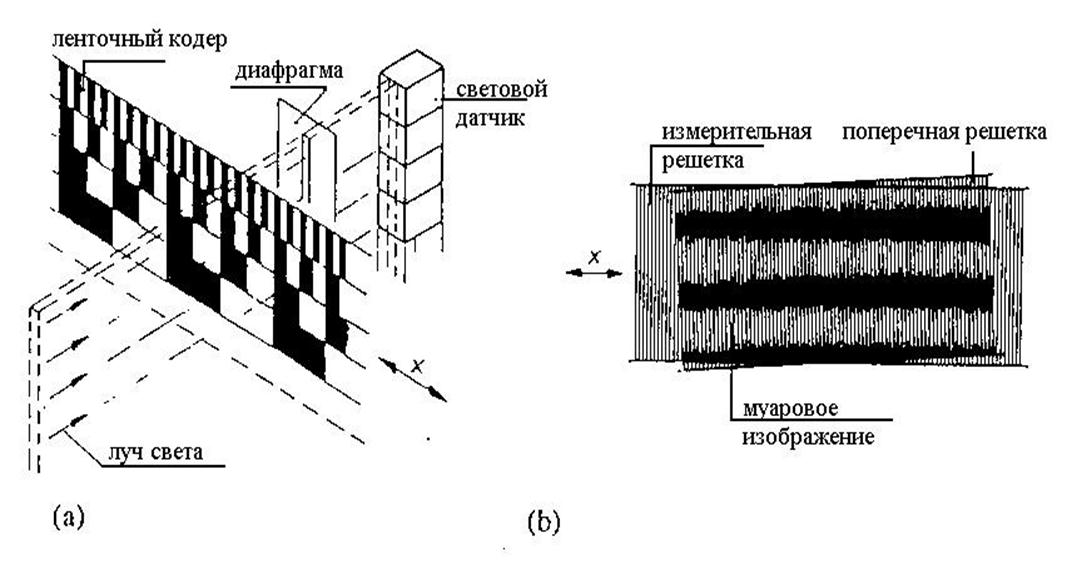
Рис. 3.10. (а) Оптический датчик смещения с кодирующей лентой. (b) Увеличение расстояния между линиями решетки с использованием муарового изображения.
При использовании такого метода можно получить увеличение чувствительности к смещению в 103 раз. Разрешающая способность составляет величину порядка 1 мкм. При использовании призм и других оптических средств эту величину можно увеличить еще больше.
Датчики скорости
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.