Для некоторых систем статическая ошибка является нежелательной или недопустимой. В этом случае переходят к такому изменению структуры управляемой части САР, что статическая ошибка отсутствует. Такое регулирование называют астатическим.
В зависимости от характера внутренних сигналов, передаваемых от одного элемента системы к другому, САР подразделяются на пять основных категорий:
· непрерывные, в которых сигналы на входе и на выходе всех элементов системы представляют собой непрерывные функции времени;
· системы с гармонической модуляцией сигнала, содержащие модуляторы (элементы, осуществляющие гармоническую модуляцию непрерывного сигнала) и демодуляторы (элементы, осуществляющие обратное преобразование гармонически модулированного сигнала в непрерывный);
· импульсные, или системы с импульсной модуляцией сигнала, содержащие импульсные элементы (импульсные модуляторы и экстраполяторы) и осуществляющие квантование сигнала по времени;
· релейные, содержащие релейные элементы и осуществляющие квантование сигнала по уровню;
· релейно-импульсные, или кодово-импульсные, в которых происходит квантование сигнала как по времени, так и по уровню.
Последние четыре категории систем относятся к дискретным САР.
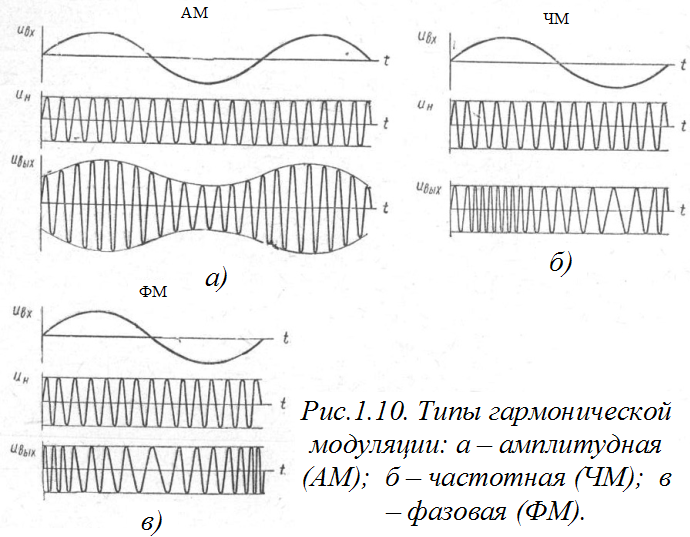
При гармонической модуляции в зависимости от входного сигнала изменяется (модулируется) некоторый заданный гармонически изменяющийся сигнал несущей частоты. Поскольку любой гармонический сигнал определяется тремя параметрами – амплитудой, частотой и фазой, – различают амплитудную (АМ), частотную (ЧМ) и фазовую (ФМ) модуляцию (рис.1.10).
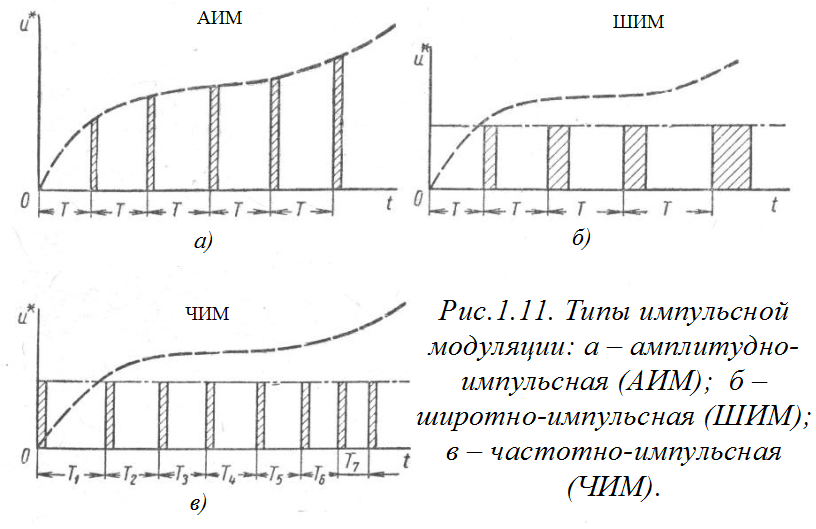
При импульсной модуляции входной сигнал модулирует по времени один из параметров периодической последовательности импульсов, которая характеризуется высотой (амплитудой) импульсов, длительностью импульсов (шириной), их положением во времени (фазой) и частотой повторения. В соответствии с этим различают амплитудно-импульсную (АИМ), широтно-импульсную (ШИМ), фазовую импульсную (ФИМ) и частотно-импульсную (ЧИМ) модуляцию (рис.1.11).
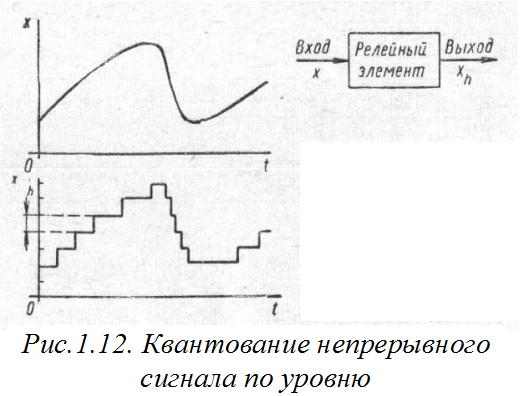
При квантовании по уровню непрерывный входной сигнал преобразуется в ступенчатый (рис.1.12) с помощью релейных элементов. Высота (амплитуда) каждой ступеньки кратна высоте некоторого элементарного ступенчатого сигнала (минимальной ступеньки), называемой шагом квантования по уровню.
К последнему классу (кодово-импульсные системы) относятся системы, содержащие ЭВМ или их элементы. САР такого рода называются цифровыми.
В зависимости от характера контролируемых изменений различают обычные (неприспосабливающиеся) и адаптивные САР. Другими словами, в адаптивных САР автоматический регулятор может самостоятельно изменять свои свойства для повышения точности регулирования (изменение своих параметров, генерирование дополнительных воздействий и др.).
 Наконец, классификация САР в зависимости от математической
модели.
Наконец, классификация САР в зависимости от математической
модели.
При проектировании и анализе САР прежде всего возникает и требует решения вопрос выбора адекватной, с требуемой степенью приближения, математической модели, определяющей изменение переменных состояния с течением времени.
Строго говоря, практически любая САР представляет собой нелинейную систему, содержащую переменные и распределенные параметры, в которой значение переменных состояния часто зависит не только от их текущих, но и от предыдущих их значений. Поэтому точное математическое описание таких систем представляет большие трудности. На практике успех исследования САР очень сильно зависит от того, насколько правильно выбрана степень идеализации при выборе математической модели системы, а современные методы ТАУ ориентированы на различные типовые математические модели реальных САР.
В зависимости от того, линейная или нелинейная математическая модель выбирается при исследовании САР, все системы подразделяются на линейные и нелинейные. Как линейные, так и нелинейные САР подразделяют на следующих три класса:
· непрерывные, для математического описания которых используются дифференциальные уравнения;
· дискретные, для описания которых используются разностные уравнения;
· дискретно-непрерывные, для описания которых используются и тот, и другой вид уравнений.
Кроме того, все САР подразделяются на детерминированные и статистические, в зависимости от того, являются ли параметры САР и приложенные к ней воздействия детерминированными или случайными функциями переменных состояния и времени.
Большую часть существующих на производстве САР составляют непрерывные системы, изучению которых посвящена дальнейшая часть курса. Изучение это целесообразно начать с линейных непрерывных систем, как более простых.
[1] Здесь и далее с целью упрощения полагаем, что переменные наблюдения полностью совпадают с переменными состояния:
.
[2] На практике с этой целью могут использоваться так называемые идентификаторы и наблюдатели состояния.
[3] Здесь и далее для упрощения полагаем, что коэффициент передачи датчика kД=1.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.