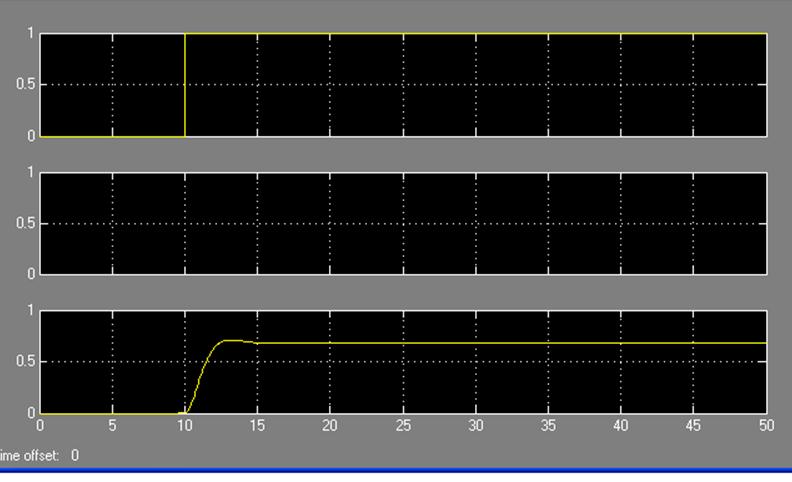
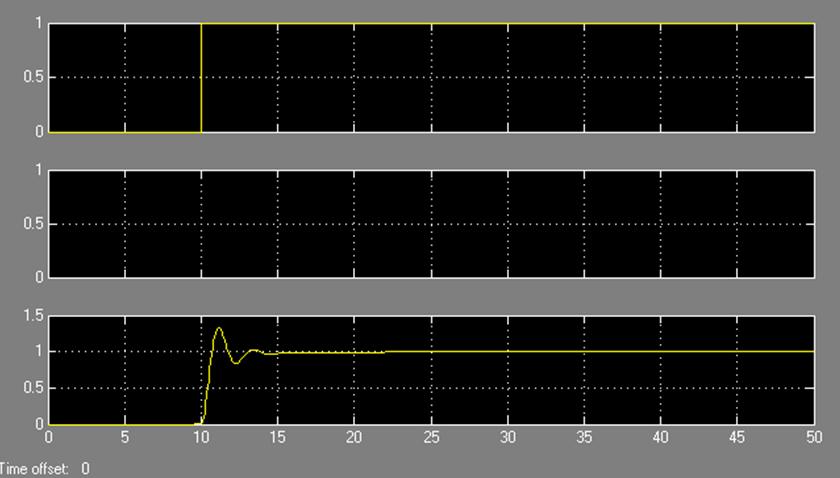
4. Выход системы на заданное единичное значение обеспечивает интегральная составляющая регулятора. Вводим коэффициент интегральной части Ki=0,1 и проводим моделирование системы. Постепенно увеличивая коэффициент Ki добиваемся выхода системы после окончания переходного процесса на заданное значение1 (см. рис. 10).
6.
Моделирование работы системы при
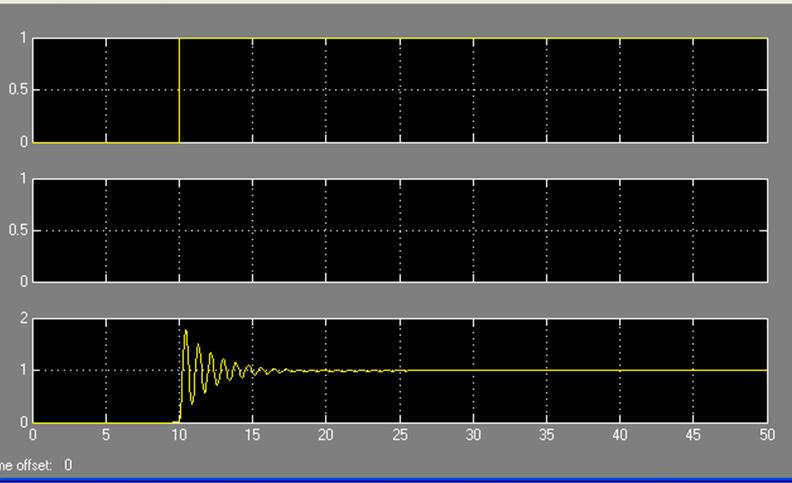
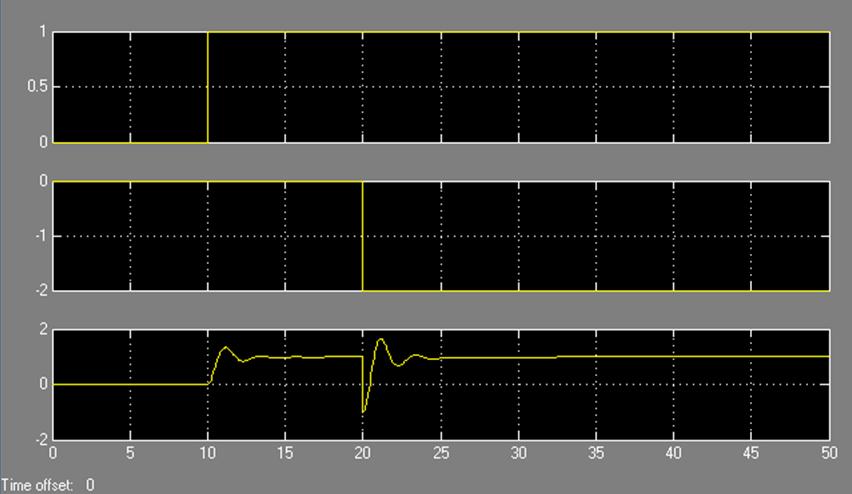
ступенчатых задающем и возмущающем воздействиях. На блоке ![]() задать ступенчатое воздействие с 0
на 2 в момент времени 20 сек и провести моделирование работы системы.
Переходной процесс отработки ступеньки по заданию и ступенчатого возмущающего
воздействия приведен на рис. 11. График выходной переменной показывает, что
система отрабатывает изменения задающего и возмущающего воздействий.
задать ступенчатое воздействие с 0
на 2 в момент времени 20 сек и провести моделирование работы системы.
Переходной процесс отработки ступеньки по заданию и ступенчатого возмущающего
воздействия приведен на рис. 11. График выходной переменной показывает, что
система отрабатывает изменения задающего и возмущающего воздействий.
7.
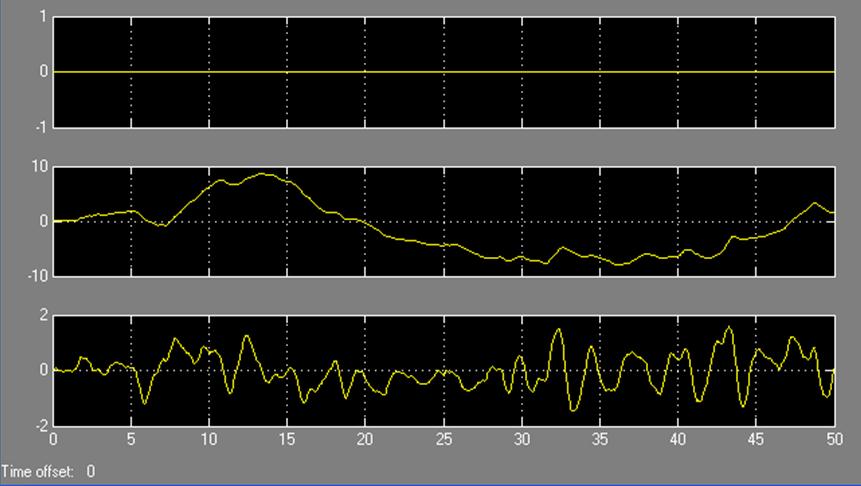
Моделирование работы системы при случайных возмущающих воздействиях.
Отключить блоки ![]() и
и ![]() (или установить на них нулевые
значения синалов). Подключить генератор случайного сигнала и формирующие
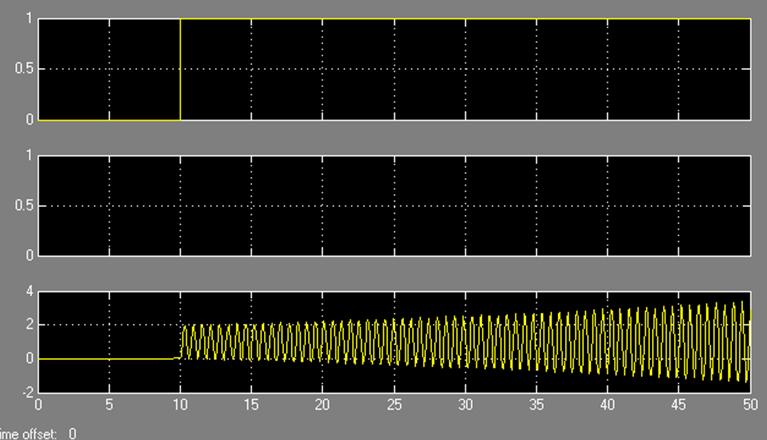
фильтры. Провести моделирование работы системы. Убедиться, что при замкнутой
системе влияние возмущающего воздействия уменьшается. На рис.12 амплитуда
возмущающего воздействия составляет
(или установить на них нулевые
значения синалов). Подключить генератор случайного сигнала и формирующие
фильтры. Провести моделирование работы системы. Убедиться, что при замкнутой
системе влияние возмущающего воздействия уменьшается. На рис.12 амплитуда
возмущающего воздействия составляет ![]() единиц, а
амплитуда колебаний выходной переменной составляет примерно
единиц, а
амплитуда колебаний выходной переменной составляет примерно ![]() . Следовательно, система уменьшила
влияние возмущающего воздействия примерно в 8 раз.
. Следовательно, система уменьшила
влияние возмущающего воздействия примерно в 8 раз.
8. Подготовить отчет по проделанной работе, включающий схему моделирования, найденные значения коэффициентов регулятора, графики переходных процессов.
9. Отчитаться по проделанной работе.
 |
||||
|
||||
|
|

|
|
|
||||
|
||||
Список использованной литературы
1. Клюев А.С. Автоматическое регулирование. -М.: Энергия, 1973. – 392с.
2. Бесекерский В.А., Теория систем автоматического регулирования. -М.: Наука, 1972. –768с.
3. Цыпкин Я.З. Основы теории автоматических систем. -М.: Наука, 1977.- 560 с.
4. Зайцев Г.Ф. Теория автоматического управления и регулирования. -К.: Вища школа, 1975.- 424с.
5. Куропаткин П.В. Теория автоматического управления. -М.: Высшая школа, 1973.- 528с.
6. Первозванский А.А. Курс теории автоматического управления. -М.:Наука, 1986. –616с.
7. Юревич Е.И. Теория автоматического управления. -Л.: Энергия, 1975. – 416с.
8. Санковский Е.К. Вопросы теории автоматического управления. Статистический анализ и синтез САУ. -М.: Высшая школа, 1971. -232 с.
9. Дроздов Н.В. Системы автоматического управления с микроЭВМ. -Л.: Машиностроение, 1989. -284 с.
10. Филипс Ч., Харбор Р. Системы управления с обратной связью. -М.: ЛБЗ, 2001. –616с.
11. Дорф Р, Бишоп Р. Современные системы управления. -М.: ЛБЗ, 2002. – 832с.
12. Топчеев Ю.И., Ципляков А.П. Задачник по теории автоматического регулирования. -М.: Машиностроение, 1977. – 592с.
13. Потемкин В.Г. MATLAB 5 для студентов. -М.: ДиалогМифи, 1998. – 314с.
14. Потемкин В.Г. MATLAB: справочное пособие. -М.: ДиалогМифи, 1997. – 350с.
15. Медведев В.С., Потемкин В.Г. Control System Toolbox. -М.: Диалог-Мифи, 1999. – 278с.
16. Дьяконов В., Круглов В. MATLAB Анализ, идентификация и моделирование систем: специальный справочник. -М.: Питер, 2002. – 448с.
17. Дэбни Д., Харман Т. Simulink 4. Секреты мастерства. -М.: Бином, 2003. –403с.
18. Дьяконов В. Simulink 4: специальный справочник. -М.: Питер, 2002. – 528с.
19. Черных И.В. Simulink. Среда создания инженерных приложений. -М.: ДиалогМифи, 2004. – 496с
20. Дьяконов В. MATLAB 6/6.1/6.5 Simulink 4/5 в математике и моделировании. -М.: Салон-пресс, 2003. – 576с.
Введение в теорию
автоматического регулирования
Методические указания
по выполнению лабораторной работы
для студентов специальности 120100
всех форм обучения
Составил
Бирюков Владимир Петрович
Рецензент О.В. ВИШТАК
Корректор А.М. Рогачева
Редактор Л.В. Максимова
Подписано в печать Формат 60х84 1/16
Бум. тип. Усл. печ. л. Уч.-изд.л
Тираж 150 экз. Заказ Бесплатно
Саратовский государственный технический университет
410054, г. Саратов, ул. Политехническая, 77

Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.