МИНИСТЕРСТВО ОБРАЗОВАНИЯ РОССИЙСКОЙ ФЕДЕРАЦИИ
МОСКОВСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ
ДИЗАЙНА И ТЕХНОЛОГИИ
Кафедра «Теоретическая механика и ТММ»
Расчетно-графическая работа
по курсу
«Теоретическая механика»
Выполнил студент гр. ЛТШ-113
Руководитель проекта
Москва – 2015
СОДЕРЖАНИЕ
|
Стр. |
||
|
ЗАДАНИЕ |
2 |
|
|
I |
Статика |
3 |
|
1. |
Расчет конструкции с учетом веса звеньев. |
4 |
|
1.1. |
Расчет звена «О-А». |
4 |
|
1.2. |
Расчет звена «А-В». |
6 |
|
1.3. |
Расчет звена «С-Д». |
8 |
|
1.4. |
Составление общей системы уравнений и ее решение |
9 |
|
1.5. |
Проверка подстановкой полученных значений в исходную систему: |
11 |
|
1.6. |
Решение системы уравнений |
12 |
|
2. |
Расчет конструкции графически без учета веса звеньев. |
14 |
|
II. |
Кинематика. |
17 |
|
1. |
Определение скоростей узлов конструкции |
17 |
|
2. |
Определение угловых скоростей звеньев конструкции. |
20 |
|
3. |
Определение ускорений шарниров |
20 |
|
4. |
Определение угловых ускорений звеньев. |
23 |
|
5. |
Построить МЦС и МЦУ звена «АВ». |
23 |
|
III. |
Динамика. |
26 |
|
1. |
Расчет главного вектора количества движения |
26 |
|
2. |
Расчет кинетической энергии конструкции |
28 |
|
ИСПОЛЬЗОВАННАЯ ЛИТЕРАТУРА |
30 |
|
ЗАДАНИЕ
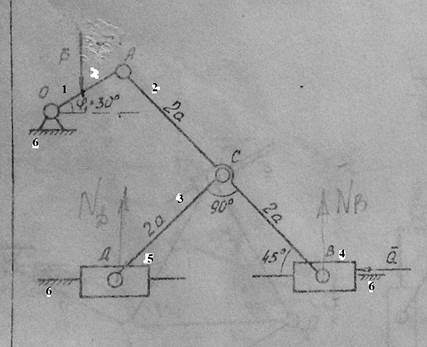
I. Статика.
Рис.1. Общая схема
Для решения задач СТАТИКИ, рассматривающей равновесие твердых тел, применяются основные законы и определения статики:
A) Под изолированной понимается материальная точка, действием на которую других материальных тел можно пренебречь.
B) Закон инерции. Изолированная материальная точка находится в покое или движется равномерно и прямолинейно.
C) Твердое тело находится в равновесии под воздействием двух сил только в том случае, если эти силы равны по модулю и противоположно направлены по общей линии действия.
D) Не нарушая состояния твердого тела можно добавлять и отбрасывать уравновешивающие силы. Не нарушая состояния твердого тела силу можно переносить по линии ее действия в любую точку тела.
E) Системы называются эквивалентными, если одну из них можно заменить другой, не нарушая состояние твердого тела.
F) Равнодействующей называется сила, эквивалентная данной системе сил.
G) Равнодействующая двух сил, приложенных в одной точке, равна по модулю диагонали параллелограмма, построенного на этих силах и направлена вдоль этой диагонали.
H) Силы, с которыми два тела действуют друг на друга, равны по модулю и противоположно направлены по одной прямой.
I) Несвободным называется такое твердое тело, на которое наложены связи, ограничивающие его движение в некоторых направлениях. Сила, характеризующая действие связи на твердое тело, называется реакцией связи.
J) Несвободное твердое тело можно рассматривать как свободное, если его мысленно освободить от связей, заменив действие связей соответствующими реакциями связей.
K) Если твердое тело опирается на идеально гладкую поверхность, то реакция поверхности направлена по нормали (нормальная реакция) в точке соприкосновения, т.е. перпендикулярно к касательной плоскости в данной точке поверхности.
Решение задач на равновесие твердого тела, независимо от взаимного расположения приложенных к телу сил, рекомендуется проводить в следующем порядке:
А) Выделить твердое тело, равновесие которого надо рассмотреть для отыскания неизвестных величин.
Б) Изобразить активные силы.
В) Если твердое тело несвободно, то, применив закон освобождаемости от связей, приложить к нему соответствующие реакции связей.
Г) Рассмотреть равновесие данного несвободного твердого тела, как тела свободного, находящегося под действием активных сил и реакций связей.
Д) Использовать необходимые и достаточные условия равновесия в соответствии со взаимным расположением сил, приложенных к твердому телу, и определить искомые величины.
1. Расчет конструкции с учетом веса звеньев.
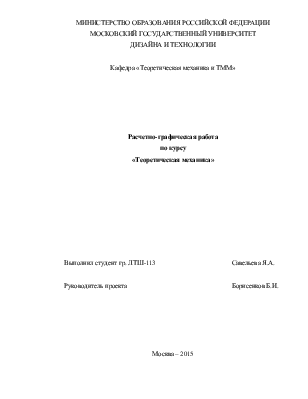
1.1.Расчет звена «ОА».
Составляем систему уравнений равновесия:
![]()
1. 
Где P – внешняя сила, воздействующая на звено «О-А»; Q – вес звена из расчета погонного веса согласно условия задачи; направление для момента против часовой стрелки является «+».
![]()
Получаем систему уравнений и выставляем номера:
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.